一、CPU芯片概述
AI人工智能技術與IoT物聯網在實際應用中落地融合的“AIoT"是物聯網發展的必然趨勢,也是各大傳統行業智能化升級的通道。控制器采用的CPU芯片架構所包含的功能模塊及各類接口,多種優勢特性將高效賦能AIoT生態鏈及對技術與場景匹配的需求。
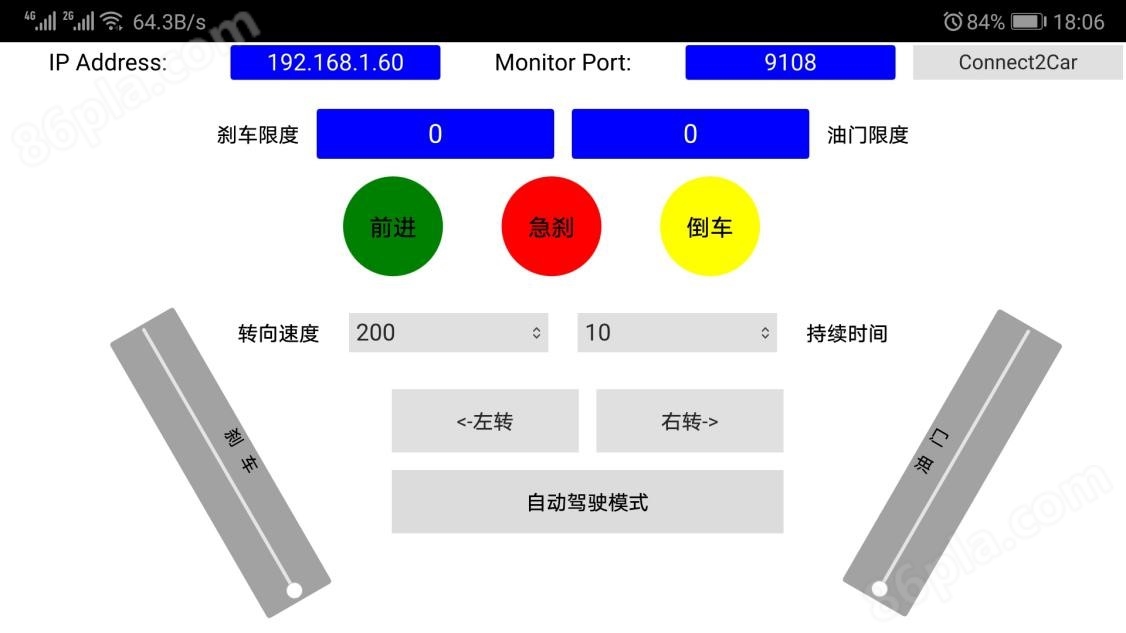
二、控制器功能概述 隨著市場行業的細分,生產產業鏈全配套的企業因部門臃腫、管理人員數量所占比重上升以及人工成本增加等原因越來越難以立足,集中優勢力量拔尖主導產品行業地位,搶占市場客戶變得愈發重要。 移動機器人控制器著眼于無人小車市場,解決行業大多數生產企業控制器研發能力不足的問題,幫助這類企業進行設備轉型升級,賦能人工智能,更加適應未來市場競爭。 2.1、路徑導航方式 控制器以“后來者居上"的態勢,集合多年來市場無人小車的發展優勢,可根據實際需求,配置單一或多種路徑導航方式,支持的導航方式如下: ● 電磁導航、磁帶導航 電磁導航是較為傳統的導航方式之一,目前仍被許多系統采用,它是在AGV的行駛路徑上埋設金屬線,并在金屬線上加載導引頻率,通過對導引頻率的識別來實現AGV的導航。 磁帶導航技術與電磁導航相近,不同之處在于采用了在路面上貼磁帶替代在地面下埋設金屬線,通過磁帶感應信號實現導引。 ● 光學導航 在AGV小車的行駛路徑上涂漆或粘貼色帶,通過對攝像機采入的色帶圖像信號進行簡單處理而實現導引。 ● 慣性導航 慣性導航是在AGV小車上安裝陀螺儀,在行駛區域的地面上安裝定位塊,AGV可通過對陀螺儀偏差信號的計算及地面定位塊信號的采集來確定自身的位置和方向,從而實現導引。 ● 二維碼導航 根據車載相機掃描地面二維碼信息,根據二維碼信息以及方向定位和判定該位置的屬性,諸如貨架站點、取貨站點、充電站點、高/低速路徑等,控制系統根據任務以及其他車輛在系統中的位置進行路徑安排和導航。 ● 視覺識別導航 視覺導航是在AGV的行駛路徑上涂刷與地面顏色反差大的油漆或粘貼顏色反差大的色帶,在AGV上安裝有攝圖傳感器將不斷拍攝的圖片與存儲圖片進行對比,偏移量信號輸出給驅動控制系統,控制系統經過計算糾正AGV的行走方向,實現AGV的導航。 1) 基于OpenCV的傳統視覺 用OpenCV對圖像進行處理后,采用Canny算法等常用邊緣提取算法對處理后的圖像做邊緣處理,再截取左右車道線,用霍夫變換等方式進行提取。這種識別方式往往會造成不理想的誤差,且受環境因素干擾較大。 2) 基于人工智能的機器視覺 使用人工智能模型對路徑進行識別,在采集足夠的數據集并對數據集進行規范的標記后,采用合適的圖像識別模型,對模型加以訓練,就可以讓機器自己學習提取特征,在各種場景圖片中提取有效的識別特征,不可控因素較少,且誤差值小。 2.2、通訊總線接口 為適應復雜的工作環境,控制器擁有豐富的外設接口和通訊手段支持,無線通訊手段支持短距離的WiFi、藍牙,也可擴展中距離的LoRa以及遠距的3/4/5G、NB-IoT等;硬件通訊接口包含USB口、RS485、CAN、Ethernet以太網,滿足絕大多數的使用場景。 2.3、通訊協議支持 為適應當下萬物互聯的時代,控制器支持的通訊協議多為國際通用標準架構,包括OPCUA、MQTT、NTCIP、Ethernet/IP以及EtherCAT等,而且使用協議加密認證機制。與無人小車的對接也可使用CAN、RS485總線方式通訊,除此之外,借助二次開發平臺SmartAgent IDE,用戶可根據自己的實際使用情況進行定制化開發擴展。 2.4、控制(駕駛)模式 控制采用閉環PID控制算法,根據人工干預程度來劃分,主要的控制模式可以分為以下三類: ● 自動控制模式 設備上電開機,在控制器上配置完成路徑導航方式等參數后,控制器根據配置參數控制小車進入自動駕駛工作模式,無需人為干預就能完成路徑軌跡導航等任務,控制小車開展相關的工作任務。 ● 輔助駕駛模式 盡管汽車都配置了后視鏡等輔助駕駛工具,但是有駕駛經驗的司機都知道,在駕駛過程中,司機對行車周圍的環境認知并不是360度,而是存在很多視野盲區。在人工操作小車底盤或實體時也都存在類似的問題,借助控制器外接搭載的攝像頭、陀螺儀、毫米波雷達,甚至是頂配版的多路激光雷達,能夠感知周圍環境,輔助駕駛員做出或修正駕駛操作。 ● 遙控模式 借助控制器強大的通訊支持功能,在短距離空間內,可以通過WiFi進行組網,使用配套的移動設備App對控制器進行配置和控制等操作,常見的比如手機App控制小車運動;針對戶外或遠距離空間,也可通過擴展3/4/5G或NB-IoT通訊手段,實現云端后臺控制,將傳統的遙控器的控制距離延伸到云端,實現隨時隨地控制。 圖-移動設備APP遙控模式簡單調試界面
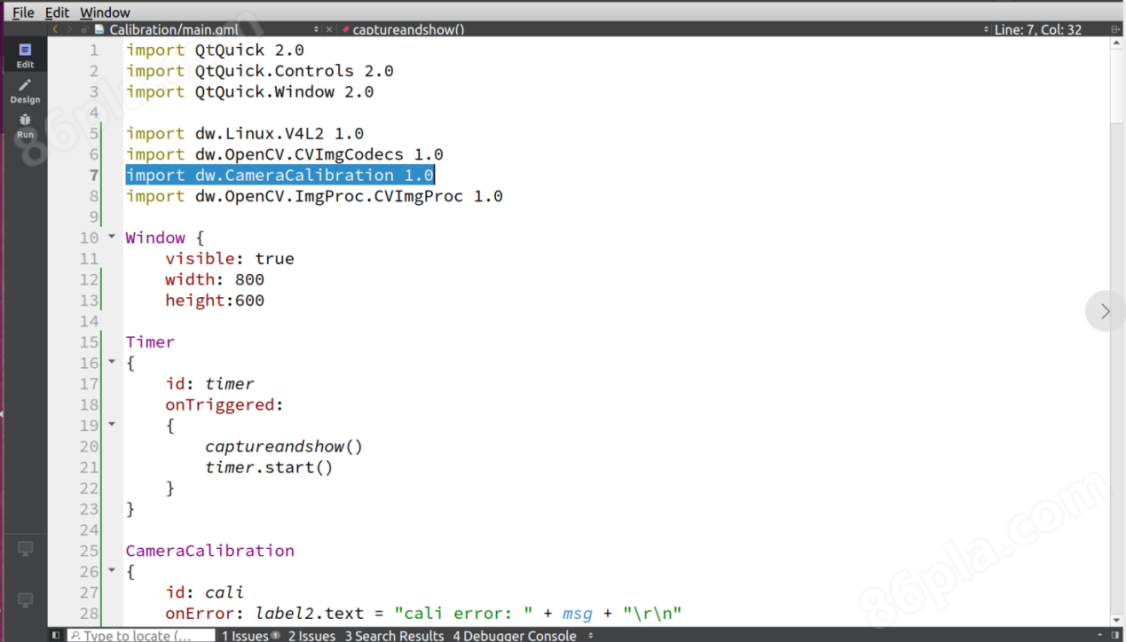
2.5、視覺庫支持 控制器集成了優化的基于OpenCV視覺應用庫和相關其它庫的支持,并提供有效實用案例: ● Opencv-based的一致性封裝 ● 相機內標定 ● 多個坐標系的標定與轉換 ● 工件定位算法指導 圖-平臺使用封裝OpenCV視覺應用庫界面
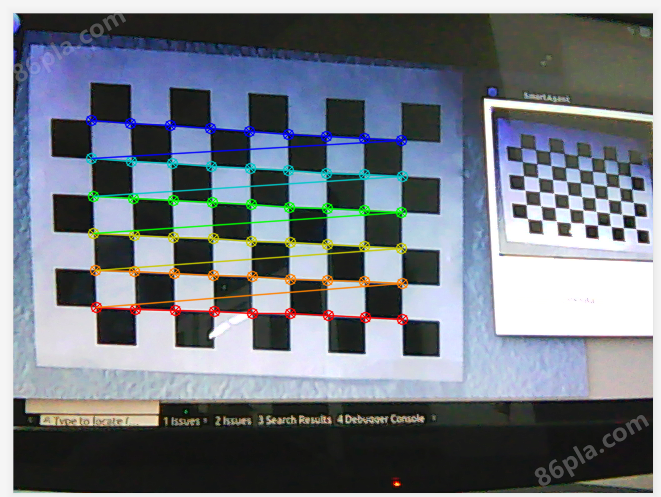
圖-相機標定示意圖
2.6、運動規劃、仿真與解算 控制器支持小車行走的運動規劃、仿真與解算,符合運動學的特征。更為重要的是,根據獲取的工件位置和方位(例如,通過視覺識別獲得),支持機器人抓舉位置的路徑規劃、各軸回轉的逆向快速解算等,對于車載機器人的實時應用有較大的工程價值和實踐意義。 三、應用場景 結合控制器豐富的外設接口及AI功能,從使用場合分,主要分為以下幾種應用場景: 3.1、AGV無人小車控制器 隨著AI技術的廣泛運用以及技術壁壘的突破,傳統AGV小車已無法滿足當下市場應用需求,盡管市場上也出現大批新興AGV生產企業,但是由于技術沉淀和積累不足等原因,都存在不同程度的研發能力不足的現象,傳統企業控制器技術更新換代緩慢,新興企業控制器雖然加入了現代化智能因素,但是要融入制造企業已有的工業物聯網絡,還存在一定的差距,無法滿足工業物聯網大環境下智能產線的使用需求。 移動機器人控制器很好的解決了以上兩種行業痛點,既融入了人工智能,又預留了多種接口協議,助力制造企業在工業4.0的潮流中完成彎道超車。 該款控制器的前期測試版本已在客戶手中成功應用,以下是調試現場圖: 圖-搭載控制器的AGV與國產機械臂對接上料
圖-搭載控制器的AGV運貨途中
圖-搭載控制器的AGV與ABB協同工作
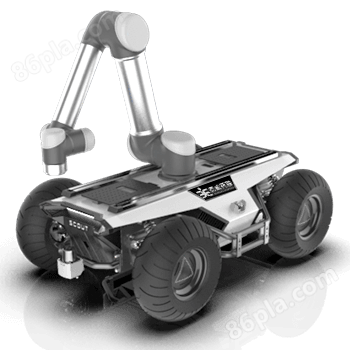
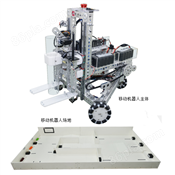
3.2、AGV + Robot的應用 圖-AGV + Robot移動工作站示意圖
3.2.1場景描述 在移動小車上配置機器人有諸多好處。如場景工作范圍大、適應性強、應用緊湊、降低成本等好處。當然,也帶來控制功能復雜多樣、能源支持要求高、設計復雜等因素。 3.2.2關鍵技術 應用控制器在這里啟用了多個關鍵技術,包括: ● 多種導航模式 提供多種導航模式供“一鍵"切換。其中AI模式比其它傳統模式,由于抗力強、魯棒性好、環境挑剔度低、適應復雜路徑等優點而競爭力;與SLAM相比較,又有明顯的價格優勢; ● 聯網協作 控制器提供的多種協議交互模式,使得AGV可以以很低的代價接入現場網絡,發送狀態和接收指令; ● 視覺處理 視覺部分負責處理環境及待處理工件的識別、定位等工作。視覺庫提供了相機內標定、坐標變換外標定等基礎功能。視覺部分通過優化的OpenCV封裝,為各種復雜功能提供支持。 ● 機器人路徑規劃及末端定位 支持按照特定的速度、加速度和加加速度的限制規劃機器人末端從A→B的規劃工作,以及逆向工程解算獲得機器人各軸旋轉參數,并最終直接控制機器人完成的工作,大幅度降低機器人特定工作的控制難度和提升動態響應性,有較強的現場應用工程價值。