

張經(jīng)理
銷售經(jīng)理
掃一掃,微信聯(lián)系

您好, 歡迎來到塑料機(jī)械網(wǎng)! 登錄| 免費(fèi)注冊(cè)| 產(chǎn)品展廳| 收藏商鋪|

18340091069
當(dāng)前位置:濟(jì)南恒樂興科儀器有限公司>>反力架加載裝置>>自平衡豎向加載系統(tǒng)>> 自平衡低周往復(fù)加載試驗(yàn)系統(tǒng)









產(chǎn)品型號(hào)
品 牌恒樂儀器
廠商性質(zhì)生產(chǎn)商
所 在 地濟(jì)南市
更新時(shí)間:2024-09-27 11:12:41瀏覽次數(shù):131次
聯(lián)系我時(shí),請(qǐng)告知來自 塑料機(jī)械網(wǎng)
張經(jīng)理

大型結(jié)構(gòu)加載實(shí)驗(yàn)系統(tǒng).



建研式結(jié)構(gòu)加載試驗(yàn)系統(tǒng)
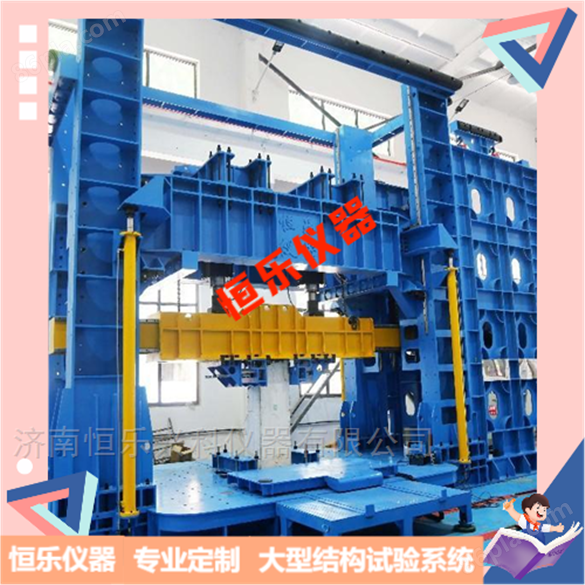
自平衡低周往復(fù)加載試驗(yàn)系統(tǒng)
自平衡低周往復(fù)加載試驗(yàn)系統(tǒng)
加載反力架
1.需為自平衡反力門式框架結(jié)構(gòu),上橫梁宜采用雙梁結(jié)構(gòu)。
2.上橫梁梁底應(yīng)設(shè)置相關(guān)構(gòu)造或配有對(duì)應(yīng)設(shè)施保證隨動(dòng)小車(作動(dòng)器)可沿梁底通長(zhǎng)移動(dòng)。
3.底梁頂面及側(cè)面均設(shè)置相關(guān)構(gòu)造(例如布安裝孔)保證試件及支座安裝方便等。
4.加載架整體尺寸不大于:6000×1200×7000mm,有效試驗(yàn)空間不小于4000×1200×4500mm。
5.反力架的豎向承載力≥3000kN,水平承載力≥1000kN。
6.額定荷載下構(gòu)件最大變形量不大于跨度的1/1000。
7.鋼構(gòu)件的結(jié)構(gòu)鋼材料強(qiáng)度等級(jí)不小于Q355B,焊后消除焊接應(yīng)力。
8.構(gòu)件工作面均進(jìn)行機(jī)加工,表面粗糙度不大于R3.2,鋼構(gòu)表面噴漆前噴砂除銹。
9.鉆孔采用數(shù)控加工的方式,間距誤差±0.1mm。可預(yù)留反力架后續(xù)相關(guān)升級(jí)接口或構(gòu)造(例如,自爬升加載架升級(jí)安裝接口,橫梁需加工出自爬升絲杠安裝孔等)。
豎向作動(dòng)器
1.最大壓縮荷載不小于3000kN,最大拉伸荷載不小于500kN,活塞行程不小于300mm。
2.內(nèi)置需安裝高精度位移傳感器,配萬向球鉸。
3.作動(dòng)器應(yīng)滿足低周往復(fù)加載及數(shù)據(jù)采集需求。
拉壓力傳感器
1.有效量程≥3000kN,線性度:0.05%,同時(shí)滿足加載控制和數(shù)據(jù)采集需求。
2.傳感器應(yīng)滿足低周往復(fù)加載控制及數(shù)據(jù)采集需求。
水平作動(dòng)器
1.需滿足安裝需求,最大拉伸、壓縮荷載不小于1000kN,活塞行程不小于500mm,應(yīng)滿足低周往復(fù)加載需求。
2.內(nèi)置安裝磁置伸縮式位移傳感器,前端后端均需配置加載鉸板。配套雙輸出荷載傳感器。
3.作動(dòng)器應(yīng)滿足低周往復(fù)加載及數(shù)據(jù)采集需求。
水平作動(dòng)器安裝板
1.用于連接水平作動(dòng)器。在框架立柱上安裝導(dǎo)軌,滑板可沿導(dǎo)軌任意調(diào)整安裝高度。
2.承載力不低于1000KN。
伺服油源
采用伺服電機(jī)驅(qū)動(dòng)油泵,可根據(jù)工作需要調(diào)整轉(zhuǎn)速,壓力分手動(dòng)控制和伺服控制兩種控制模式,手動(dòng)控制壓力輸出不少于1路,0-28MPa連續(xù)可調(diào),伺服控制壓力輸出不少于2路,0-28MPa連續(xù)可調(diào),可進(jìn)行荷載、位移閉環(huán)控制。系統(tǒng)流量≥10L/min,雙泵結(jié)構(gòu)。
多通道電液伺服控制系統(tǒng)
1.與伺服油源配合使用,可實(shí)現(xiàn)不少于3個(gè)作動(dòng)器的力、位移電液伺服閉環(huán)控制協(xié)調(diào)加載;
2.試驗(yàn)軟件可根據(jù)用戶給定的數(shù)據(jù)進(jìn)行設(shè)計(jì),能進(jìn)行壓剪實(shí)驗(yàn)豎向雙缸協(xié)同加載。
3.系統(tǒng)在全程閉環(huán)控制狀態(tài)下,應(yīng)具備力控、位移控制等多種控制功能,并且在試驗(yàn)過程中應(yīng)能夠?qū)崿F(xiàn)所有控制方式以及控制速率的任意無沖擊平滑切換。
4.控制系統(tǒng)的主要參數(shù)(荷載等)應(yīng)能通過模擬輸出或數(shù)字輸出等形式將系統(tǒng)信號(hào)傳輸給外部數(shù)據(jù)采集系統(tǒng),實(shí)現(xiàn)控制系統(tǒng)與外部數(shù)據(jù)采集系統(tǒng)進(jìn)行同步采集的功能要求。
擬動(dòng)力實(shí)驗(yàn)操作系統(tǒng)
1.軟件應(yīng)具有良好的用戶界面,試驗(yàn)前能夠交互式輸入地震加速度時(shí)程曲線,選取試驗(yàn)所需范圍的加速度時(shí)程,建立樓層的滯回模型。
2.試驗(yàn)過程中能夠?qū)崟r(shí)顯示各樓層的地震響應(yīng)時(shí)程曲線、樓層的滯回曲線、結(jié)構(gòu)振動(dòng)動(dòng)畫,以及與試驗(yàn)設(shè)備之間的指令和反饋數(shù)據(jù)交互。試驗(yàn)結(jié)束后能顯示樓層的滯回曲線,輸出子結(jié)構(gòu)擬動(dòng)力試驗(yàn)的相關(guān)結(jié)果。
3.試驗(yàn)軟件能夠和電液伺服試驗(yàn)系統(tǒng)控制軟件連接通訊,能夠?qū)⒔Y(jié)構(gòu)時(shí)程分析得到的試驗(yàn)子結(jié)構(gòu)加載指令發(fā)送給試驗(yàn)控制系統(tǒng),并實(shí)時(shí)獲取試驗(yàn)子結(jié)構(gòu)的位移和力響應(yīng),能夠設(shè)定相關(guān)的判斷準(zhǔn)則來決定結(jié)束一個(gè)試驗(yàn)步,保證子結(jié)構(gòu)擬動(dòng)力試驗(yàn)平穩(wěn)進(jìn)行。
4.試驗(yàn)軟件需要具有網(wǎng)絡(luò)化的試驗(yàn)功能,提供擬動(dòng)力軟件的詳細(xì)資料以及軟件界面截圖。
5.配有相應(yīng)的數(shù)據(jù)采集用計(jì)算機(jī)電腦、顯示器及相應(yīng)操作用鍵盤、鼠標(biāo)等附屬硬件。
自平衡反力架
自平衡反力系統(tǒng)套裝
大型結(jié)構(gòu)試驗(yàn)系統(tǒng)
簡(jiǎn)支梁反力框架試驗(yàn)系統(tǒng)
構(gòu)件疲勞試驗(yàn)系統(tǒng)
鋼筋混凝土梁虛擬受彎試驗(yàn)系統(tǒng)
鋼桁架靜載荷實(shí)驗(yàn)系統(tǒng)
長(zhǎng)柱結(jié)構(gòu)試驗(yàn)系統(tǒng)
鋼桁架加載試驗(yàn)系統(tǒng)
電液伺服多功能結(jié)構(gòu)試驗(yàn)系統(tǒng)
請(qǐng)輸入賬號(hào)
請(qǐng)輸入密碼
請(qǐng)輸驗(yàn)證碼
掃一掃訪問手機(jī)商鋪
微信掃碼進(jìn)入微名片
以上信息由企業(yè)自行提供,信息內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由相關(guān)企業(yè)負(fù)責(zé),塑料機(jī)械網(wǎng)對(duì)此不承擔(dān)任何保證責(zé)任。
溫馨提示:為規(guī)避購(gòu)買風(fēng)險(xiǎn),建議您在購(gòu)買產(chǎn)品前務(wù)必確認(rèn)供應(yīng)商資質(zhì)及產(chǎn)品質(zhì)量。

 塑料機(jī)械網(wǎng)
塑料機(jī)械網(wǎng)