注塑機 擠出機 造粒機 吹膜機 吹塑機 吹瓶機 成型機 吸塑機 滾塑機 管材生產線 板材生產線 型材生產線 片材生產線 發泡設備 塑料壓延機
安徽合動智能科技有限公司

安徽合動智能科技有限公司
暫無信息 |
技術參數一、機械臂本體參數1
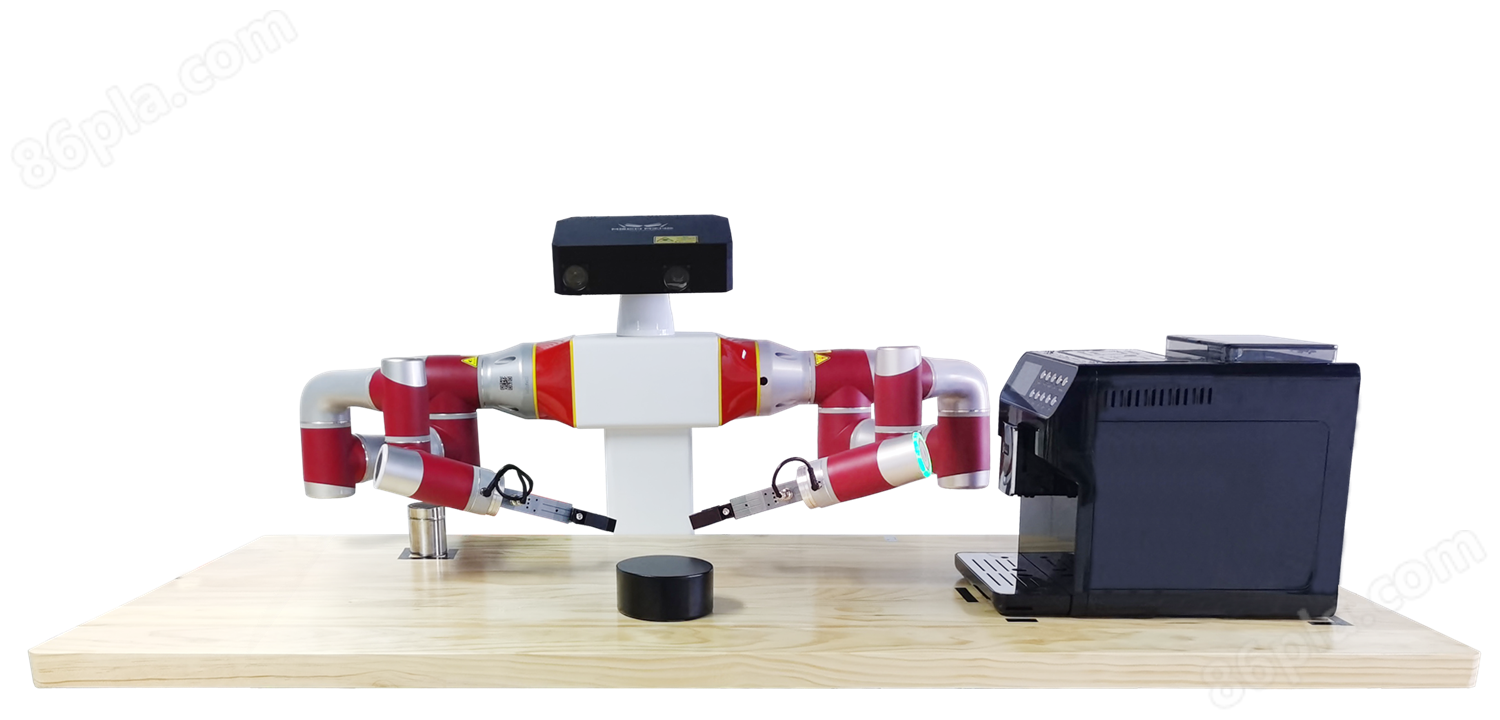
技術參數
一、機械臂本體參數
1.重復定位精度:±0.1mm
2.環境濕度:25-85%(無冷凝)
3.環境溫度:-20-45℃
4.功耗:150w(普通工況下)
5.額定壽命:30000h
6.自由度:6
7.工作半徑:610mm
8.負載:3kg
9.供電電源:DC48V
10.六軸參數:
J1-J5基座 工作范圍:±360°速度:±180°
J6-腕部 工作范圍:±360°速度:±300°
11.關節模組可以打開,可以進行拆裝,可以自由組合,可提供關節模組打開的內部結構圖片并能清晰看到驅動器、編碼器。
二、驅動系統功能
1.控制方式:串口、CAN總線
2.異常保護程序具備欠壓、過壓、過流、堵轉、Hall或編碼器異常保護功能及故障報警輸出功能,提供相應Simulink軟件模塊
(6)具備FOC磁場定向控制算法軟件模塊,提供相應Simulink軟件模塊
(7)具備PID算法和電流、速度、位置三閉環算法軟件模塊,提供相應Simulink軟件模塊
三、控制系統
1.CPU:ARM Cortex-A8,主頻1000MHz
2.ROM:4GByte eMMC
3.RAM:256M DDR3
4.Shared RAM:64KByte
5.SPI Flash:8MByte
6.3D圖形加速器:SGX530
7.支持MATLAB/Simulink和 ROS聯合開發,支持交叉編譯
8.提供機械臂運動學仿真模型、實物控制算法模型,提供正解逆解、關節空間軌跡規劃、笛卡爾空間軌跡規劃實驗案例
9.提供機械臂動力學仿真模型、實物控制算法模型,提供單關節和雙關節的重力補償、摩擦力補償、零力拖動實驗案例
10.提供動力學建模方法與程序,包括NEWTON-EULER程序與LAGRANGE程序,可自動計算出任意自由度的動力學模型方程和雅克比矩陣;提供動力學參數辨識方法與程序,提供截圖證明;提供PID控制算法與程序,提供截圖證明;提供魯棒控制、自適應控制方法與程序
11.提供雙臂協同的運動規劃實驗案例
四、開源雙目視覺系統
1.尺寸:約為90mm × 25mm × 25mm;
2.重量:72-90g;
3.深度景深(FOV):87°±3°x 58°±1°x 95°±3°;
4.最小深度距離:0.105 m;
5.3D視覺系統采用Intel RealSense和OpenCV,提供開源邊緣檢測、輪廓檢測、人臉檢測、圖像旋轉縮放變換、相機標定、視覺抓取等實驗案例和算法
五、高性能末端夾爪
1.有效行程:20mm(可調);
2.夾持力:80N(可調);
3.電機:伺服電機;
4.輸入電壓:DC24V;
5.控制方式:邏輯電平控制開合,脈沖控制行程;
六、監控軟件
1.可采集Simulink程序中任意的變量數據,每關節3路共18路數據,并用波形顯示,波形橫軸長度可調節,波形數據可保存、可回放
2.可控制機械臂的關節角度、末端坐標以及關節和坐標的步進控制,可顯示機械臂的關節角度、末端坐標
3.采用*的MBD的開發方式,可完成機器人運動學、動力學實驗,提供機械臂動力學仿真模型、實物控制算法模型,提供單關節和雙關節的重力補償、摩擦力補償、零力拖動實驗案例
七、其它功能
開放電流環、速度環、位置環,提供驅動原理圖;
您感興趣的產品PRODUCTS YOU ARE INTERESTED IN









塑料機械網 設計制作,未經允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼



