注塑機 擠出機 造粒機 吹膜機 吹塑機 吹瓶機 成型機 吸塑機 滾塑機 管材生產線 板材生產線 型材生產線 片材生產線 發泡設備 塑料壓延機

深圳市科瑞特自動化技術有限公司

深圳市科瑞特自動化技術有限公司
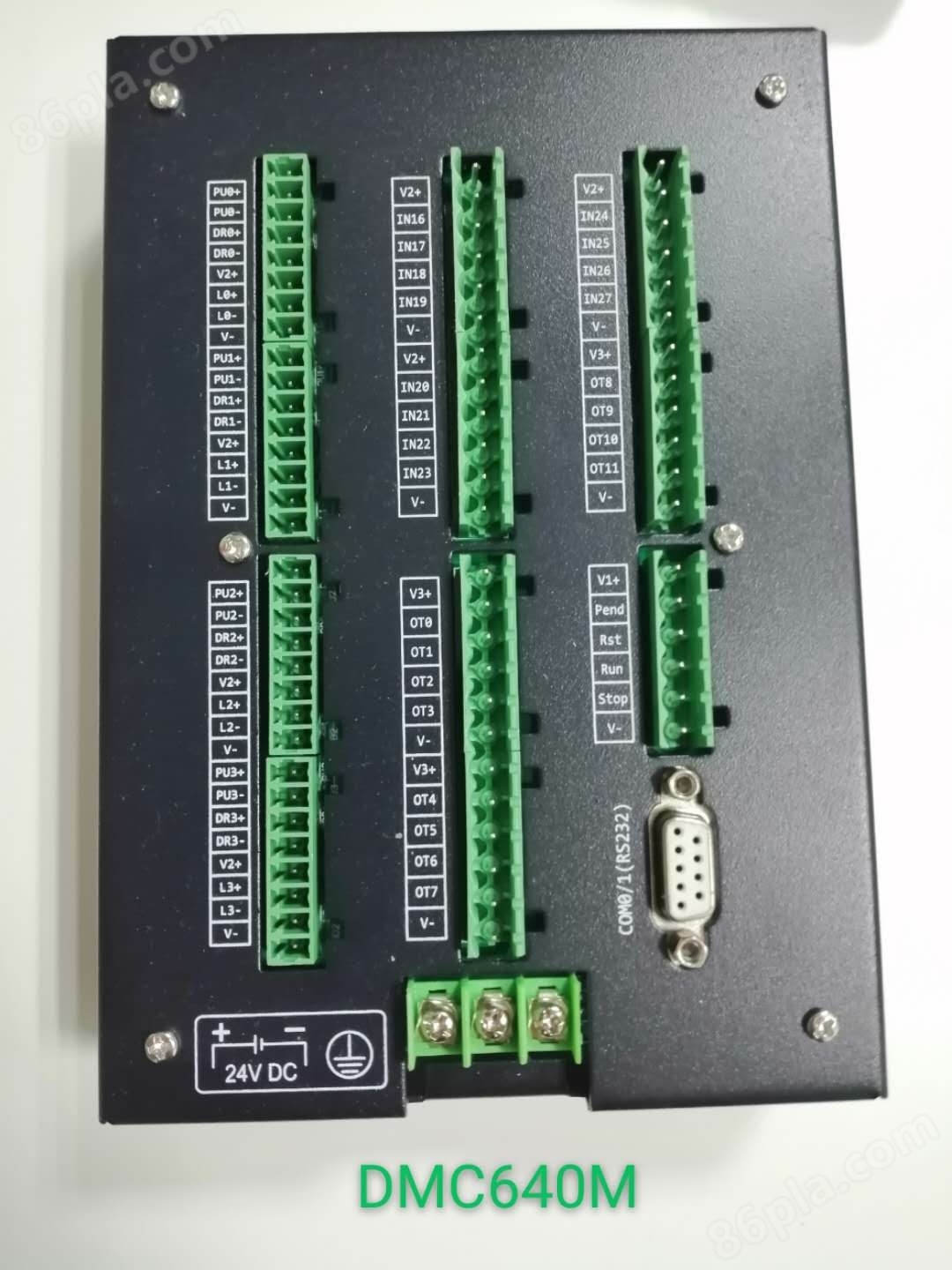
DMC600M系列DMC640M四軸搬運機械手控制系統,其硬件結構基于高性能 DSP 為控制核心、FPGA 協處理,插補算法、脈沖信號產生及加減速控制、I/O 信號的檢測處理,均由硬件和固件實現,確保了運動控制高速、高精度及系統穩定。
基于DMC640M運動控制器的機械手上下料系統
1.DMC640M的硬件性能
四軸搬運機械手控制系統 DMC600M系列DMC640M,其硬件結構基于高性能 DSP 為控制核心、FPGA 協處理,插補算法、脈沖信號產生及加減速控制、I/O 信號的檢測處理,均由硬件和固件實現,確保了運動控制高速、高精度及系統穩定。可控制 4個步進或伺服電機,具有四軸直線插補、圓弧插補并其他軸聯動、加速曲線自動控制等高級功能。固件已嵌入 DMC 運動控制指令系統,該指令系統功能強大、應用靈活、使用簡單。
技術指標
輸出脈沖:
模式:脈沖+方向;
頻率:1Hz~200KHz/軸;
光電隔離:3750 Vrms (min)
驅動能力:150mA/24V(系統內部已串限流電阻,直接驅動 5V 端口設備);
插補性能。
I/O 信號:
通用輸入口:全部光電隔離(3750 Vr.m.s);公共端:V-(DC24V 地);
通用輸出口:(NMOS 管)集電極開漏輸出,2A24V/OUT,可以直接驅動 24V 繼電器及電磁閥;
通用指標
工作溫度:0℃~50℃
貯存溫度:-20℃~80℃
濕度:5~95%,非結露
電源:24V±20%直流輸入;系統內部功耗<10W,建議使用 30W 以上;
尺寸:178*142*55mm;
典型應用
科瑞特 DMC640M運動控制器已廣泛應用于各行各業自動化設備中。主要設備有:
電子產品裝配、測量設備;
半導體、LCD 生產設備;
振動刀切割設備;
拋光打磨、石材切割、焊接設備;
激光加工設備;
生物、醫學自動采樣、處理設備;
特種數控機床;
機器視覺及自動檢測設備;
工業機器人;
其它控制步進電機、伺服電機的自動化設備。
2. 四軸搬運機械手控制系統 上下料的運動軌跡
AAA客戶的生產線上需要使用機械手上下料,結構如圖1所示。X軸執行水平左右運動,Y軸執行豎直上下運動,手爪由氣缸控制執行抓取動作。它們的任務是將右側工裝上的工件依次抓取至左側傳送帶上。X軸原點距離傳送帶上工件放置點為W,工裝上*個工件距離傳送帶上工件放置點為S,工裝上每個工件之間的距離均為L。
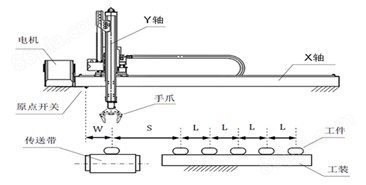
圖1 機械手上下料系統組成
通常大多數用戶會將X、Y的運動軌跡確定為矩形,即Y軸上下運動完成后X軸再水平運動,然后Y軸再次上下運動,如此反復進行。但這樣的方式會導致比較強烈的抖動,并且造成一定的時間浪費。因此,可采用圖2所示的運動軌跡,在2個拐彎處,X、Y軸進行一段半徑為R的圓弧插補運動,這樣可大大減弱抖動,且能節省時間。A點為起始點,抓取并放置第1個工件的路徑為A→B→C→D→E→F→G→H→I→J→K,抓取并放置第2個工件的路徑與*個相同,只不過A→B和F→G的距離增加了長度L,第3個、第4個、第5個亦然。
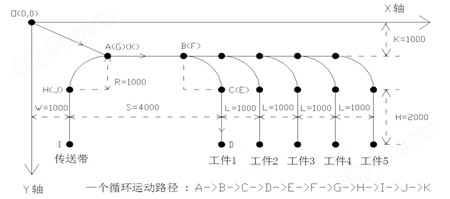
圖2 機械手上下料運動軌跡
DMC640M支持連續插補運動,在連續插補模式下,速度是連續的,各插補段之間沒有加減速過程,從而使得運動更加平滑。

圖3 連續插補運動
您感興趣的產品PRODUCTS YOU ARE INTERESTED IN






塑料機械網 設計制作,未經允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼








