


CX/powertwo熒光激光雷達(dá)系統(tǒng)科研使用場景:
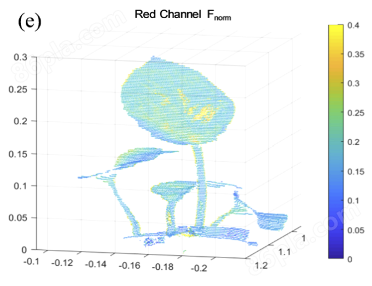
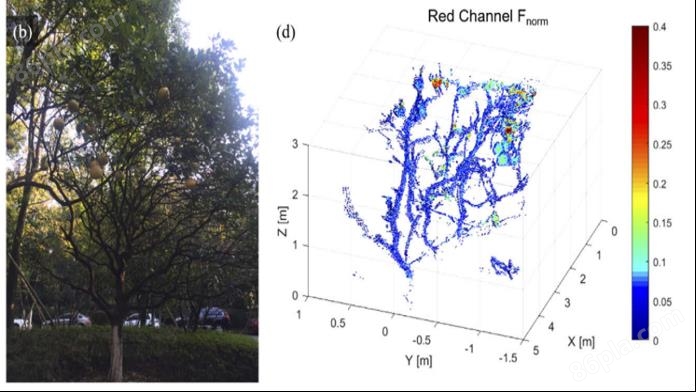
1)植物表型探測:熒光激光雷達(dá)可以獲得三維熒光點(diǎn)云,從而在獲得植物形狀結(jié)構(gòu)參數(shù)的同時,通過多光譜熒光數(shù)據(jù)獲得特征組份與生理參數(shù)的三維空間分布。
2)枝葉分割:傳統(tǒng)的枝葉分割基于點(diǎn)云的空間位置與強(qiáng)度,需要匹配負(fù)責(zé)的算法,魯棒性不強(qiáng)。由于枝葉的葉綠素含量相差較大,而熒光多光譜點(diǎn)云與葉綠素?zé)晒庹嚓P(guān),因而通過熒光點(diǎn)云可以很容易的實現(xiàn)枝葉分離,且結(jié)果穩(wěn)定可靠。
3)地上生物量計算:在使用激光雷達(dá)進(jìn)行地上生物量檢測時,需要排除樹葉點(diǎn)云的影響。熒光激光雷達(dá)可以準(zhǔn)確地排除樹葉點(diǎn)云,不需要人工剪除樹葉,實現(xiàn)了生物量的無損檢測。
4)脅迫探測:各種脅迫下葉綠素的熒光響應(yīng)一直是植物表型領(lǐng)域的研究熱點(diǎn)。熒光激光雷達(dá)可以獲取各點(diǎn)的多通道熒光強(qiáng)度,并可以定制程序?qū)崿F(xiàn)定時自動掃描記錄,為脅迫探測提供高通量解決方案。
5)葉綠素分布探測:本熒光激光雷達(dá)實現(xiàn)的多通道熒光,可以定性得到葉綠素濃度相對分布,并可通過標(biāo)定獲得準(zhǔn)確濃度分布的測量。
6)葉面積指數(shù)探測:在枝葉分離的基礎(chǔ)上,通過對點(diǎn)云數(shù)據(jù)的計算與疊加,實現(xiàn)準(zhǔn)確葉面積指數(shù)的探測。
教學(xué)使用場景:
1)形態(tài)結(jié)構(gòu)測量教學(xué):在林業(yè)資源調(diào)查中,傳統(tǒng)植物形態(tài)結(jié)構(gòu)測量需要通過人工方式,使用卷尺等傳統(tǒng)工具測量植株的高度、胸徑、地上生物量等參數(shù)。對于較高的林木,往往需要使用胸徑乘以一定系數(shù)進(jìn)行估算,因而會引入誤差;對于地上生物量的測量,需要對植物進(jìn)行破快性測量,在教學(xué)時只能對測量過程進(jìn)行描述。熒光激光雷達(dá)可以獲得林木的熒光點(diǎn)云。通過對點(diǎn)云的處理,可以獲得不同高度的胸徑、植株的高度。對生物量進(jìn)行測量時,可以引入枝葉分割算法,通過點(diǎn)云的多光譜熒光特性方便的將樹葉點(diǎn)云去除,留下枝干點(diǎn)云進(jìn)行計算最終得到體積。教學(xué)過程包括多點(diǎn)數(shù)據(jù)采集、降噪、點(diǎn)云匹配、枝葉分離、數(shù)據(jù)擬合、計算等過程,培養(yǎng)學(xué)生動手實驗?zāi)芰εc數(shù)據(jù)處理能力。
2)脅迫熒光檢測探索教學(xué):葉綠素?zé)晒馐且环N常見的植物表型檢測方式。通過葉綠素?zé)晒獾淖兓梢蕴剿髦参镌谌彼⑷钡⑷惫庹盏让{迫條件下的反應(yīng),從而建立表型與脅迫預(yù)測模型。本系統(tǒng)可以同時獲取點(diǎn)云信息與熒光信息,可作為學(xué)生探索植物不同因素脅迫時的檢測工具,應(yīng)用于一些脅迫反應(yīng)的驗證與新脅迫反應(yīng)的探索。
系統(tǒng)特點(diǎn):
1)同時獲取三維點(diǎn)云與RGB三通道熒光點(diǎn)云;
2)采用推掃式結(jié)構(gòu),單次對一個平面進(jìn)行探測,角分辨率較128線激光雷達(dá)可以高1個數(shù)量級;
系統(tǒng)指標(biāo):
指標(biāo) | 參數(shù) |
激光波長 | 405nm/450nm/520nm可選 |
激光功率 | 405nm不小于400mW;450nm/520nm不小于1W;功率可調(diào) |
掃描方式 | 推掃式旋轉(zhuǎn)掃描 |
掃描范圍 | 水平角≥45度,俯仰角≥70度,精確測量范圍0~10米(可按需求定制); |
掃描精度 | 2米處精度≤1cm |
光譜通道數(shù) | RGB 3通道 |
掃描速率 | 多檔速度可調(diào) |
供電電壓 | 12VDC/220VAC可選 |
系統(tǒng)體積 | 不大于30*30*30cm(不包括支架) |