

本公司承諾免費(fèi)質(zhì)保一年!終身維護(hù)!
伺服電機(jī)使用方式,如果是脫鏈?zhǔn)揭苿?dòng),請與客戶人員說明,謝謝!
本套伺服驅(qū)動(dòng)器可替換邁信、廣數(shù)、凱恩帝、埃斯頓,信捷伺服!
產(chǎn)品一套清單:
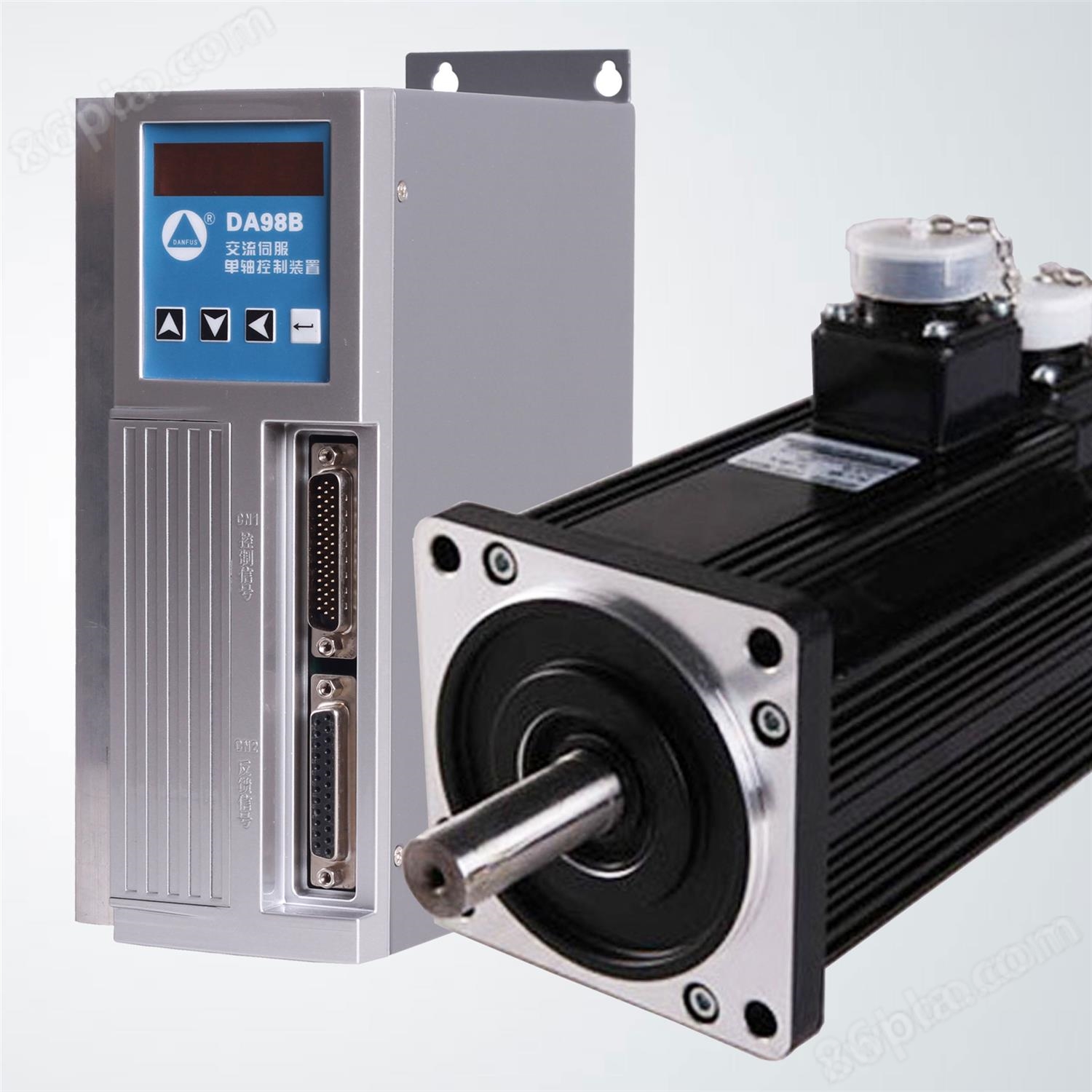
1、伺服電機(jī)一臺(tái)
2、伺服驅(qū)動(dòng)器一臺(tái)
3、編碼器線一根(3米)
4、電機(jī)電源線一根(3米)
5、25芯并口接頭一個(gè)
6、說明書一本
電機(jī)材料
1. 航空插座使用的是重強(qiáng)品牌,(鍍金)
2. 漆包線使用的180T,耐高溫180度
3. 稀土永磁材料使用的是江西一家上市公司,型號(hào)為 SH-T,每一塊磁通量相差不超過1%(穩(wěn)定性),在 150高溫烘箱烘烤2個(gè)小時(shí),反復(fù)三次,然后測試永 磁材料,退磁率不超過3%
伺服驅(qū)動(dòng)器型號(hào):DSD23
功率:該伺服驅(qū)動(dòng)器適配功率為1.2KW~2.6Kw電機(jī)
自主研發(fā)的新一代全數(shù)字交流伺服驅(qū)動(dòng)器,主要采用數(shù)字信號(hào)處理器DSP技術(shù)和大規(guī)模可編程FPGA技術(shù)為核心的運(yùn)算單元,及智能IPM功率模塊,具有響應(yīng)速度快,保護(hù)完善,可靠性高等一系列優(yōu)點(diǎn)。
調(diào)速比為1:5000,從低速到高速都具有穩(wěn)定的轉(zhuǎn)矩特性
控制定位精度±0.01%,300%的過載能力
采用空間矢量控制算法,比普通的SPWM 產(chǎn)生的力矩更大,噪音更小
完善的保護(hù)功能:過流,過壓,過熱和編碼器故障
多種顯示功能:包括電機(jī)轉(zhuǎn)速、電機(jī)電流、電機(jī)位置、位置偏差、脈沖個(gè)數(shù)、脈沖頻率、直線速度、輸入輸出接口診斷、歷史報(bào)警記錄等
DSD10伺服驅(qū)動(dòng)器是基座安裝型伺服驅(qū)動(dòng)器
儲(chǔ)存條件:在未通電的狀態(tài)下儲(chǔ)存伺服驅(qū)動(dòng)器時(shí),請?jiān)谙率鰷囟确秶鷥?nèi)進(jìn)行儲(chǔ)存:-20 ~ +85 ℃安裝場所
控制柜內(nèi)的環(huán)境條件:
1.伺服驅(qū)動(dòng)器的環(huán)境溫度:0 ~ 55 ℃
2.濕度:90%RH(相對濕度)以下
3.振動(dòng):4.9m/s2
4.不要出現(xiàn)凍結(jié)、結(jié)露等現(xiàn)象
5.為了保證長期使用的可靠性,請?jiān)诘陀?/span>45 ℃的環(huán)境溫度條件下使用
與模擬指令輸入電路的接口:模擬信號(hào)是速度指令信號(hào)和轉(zhuǎn)矩指令信號(hào),指令輸入阻抗約40kΩ,輸入信號(hào)的允許電壓為±10V與輸入電路的接口:使用繼電器或者集電極開路的晶體管電路來連接。使用繼電器連接時(shí),請選定微小電流用繼電器。如果不使用微小電流用繼電器,則會(huì)造成接觸不良。與總線驅(qū)動(dòng)器輸出電路的接口:將編碼器的2相(A相,B相)脈沖的輸出信號(hào)(PAO、/PAO、PBO、/PBO)和原點(diǎn)脈沖信號(hào)(PCO、/PCO)通過總線驅(qū)動(dòng)器輸出電路進(jìn)行輸出。通常當(dāng)在上位裝置側(cè)構(gòu)成位置控制系統(tǒng)時(shí)使用。在上位裝置側(cè),請使用線接收電路接收。與輸出電路的接口:伺服報(bào)警、伺服準(zhǔn)備就緒以及其它的順序用輸出信號(hào)由光電耦合器輸出電路構(gòu)成。使用繼電器、線接收電路連接。
自動(dòng)調(diào)諧
通過采用了新的算法的慣性恒等功能和5種調(diào)諧特性選擇、30級(jí)響應(yīng)性設(shè)定或利用參數(shù)的自動(dòng)保存功能,可實(shí)現(xiàn)提高響應(yīng)性的自動(dòng)調(diào)諧。
控制方式切換
位置控制、速度控制、力距控制這三種控制形式。
電源高次諧波對策
標(biāo)準(zhǔn)裝備有DC扼流圈子連接端子作為電源高次諧波的對策用。
6位顯示LED、內(nèi)置操作鍵盤
能在現(xiàn)場方便地進(jìn)行設(shè)定或監(jiān)控。可以用內(nèi)置操作鍵盤進(jìn)行參數(shù)變更、監(jiān)控裝置和報(bào)警追跡的調(diào)整等。
減振控制
利用前饋減振控制,可通過簡單的調(diào)整來抑制機(jī)械前端的振動(dòng)和機(jī)架的振動(dòng)。同時(shí),能夠設(shè)定并選擇使用4種用以控制振動(dòng)的頻率。
縮短了定位整定時(shí)間
通過采用新算法,可大幅度地縮短裝置的定位整定時(shí)間。
指令追蹤抑制
采用新的位置和算法,可使位置抑制追蹤能力提高到現(xiàn)有模型的兩倍,并且,基本可實(shí)現(xiàn)零位置偏差。
試運(yùn)轉(zhuǎn)功能(微動(dòng)功能)
搭載有能夠確認(rèn)馬達(dá)和放大器連接的微動(dòng)功能,不必與上位裝置連接,便能進(jìn)行試運(yùn)轉(zhuǎn)
















