


沖壓機器人主要由執行機構、驅動機構和控制系統三大部分組成。
手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。

運動機構,使手部完成各種轉動(擺動)、移動或復合運動來實現規定的動作,改變被抓持物件的位置和姿勢。運動機構的升降、伸縮、旋轉等獨立運動方式,稱為機械手的自由度 。為了抓取空間中任意位置和方位的物體,需有6個自由度。自由度是機器人設計的關鍵參數,自由度越多,機械手的靈活性越大,通用性越廣,其結構也越復雜,一般專用機械手有2~3個自由度。控制系統是通過對沖壓機器人每個自由度的電機的控制,來完成特定動作。同時接收傳感器反饋的信息,形成穩定的閉環控制,控制系統的核心通常是由單片機或dsp等微控制芯片構成,通過對其編程實現所要功能。
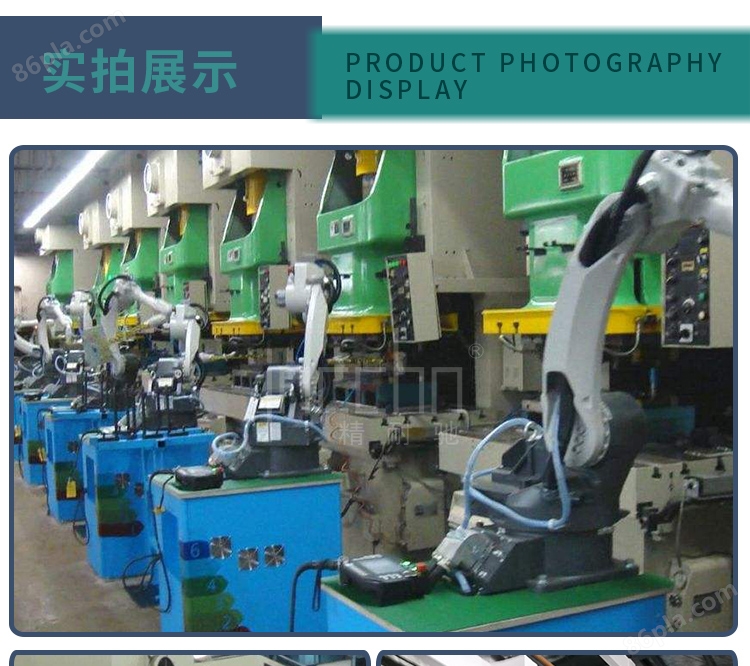

沖壓上下料專用型
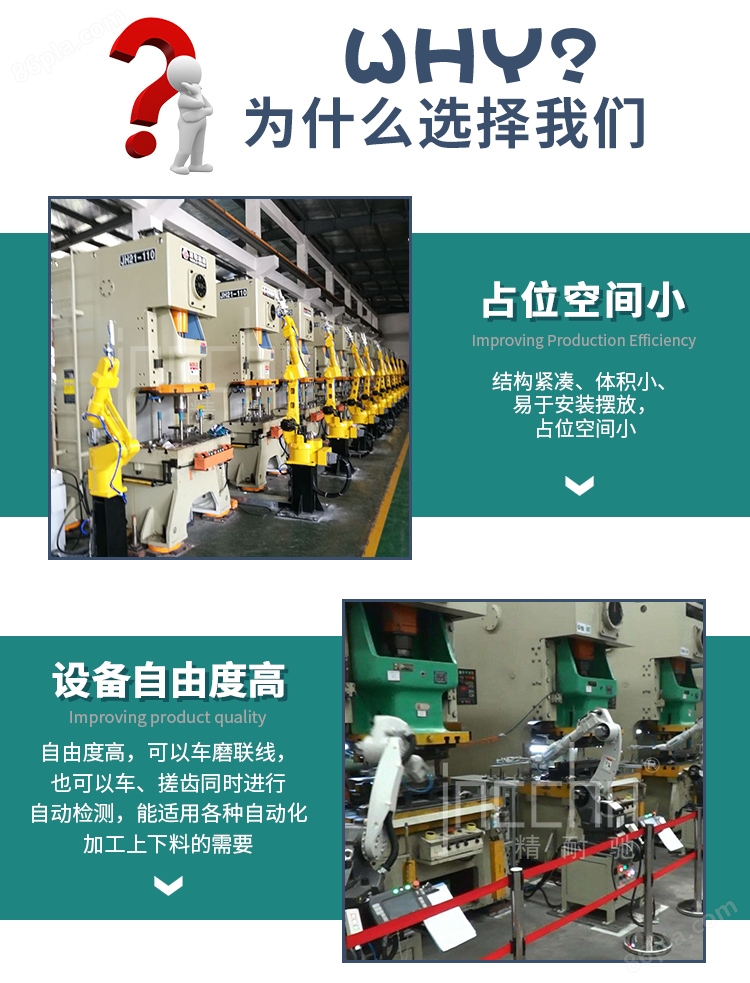
1、機器采用三軸到四軸高速聯動技術,運動效率達到8-12次/分鐘;
2、采用智能運動控制器,執行四軸聯動;能y夠識別沖床兩次或多次沖壓,保護機器人和沖床安全,存儲產品信息高達100多組;
3、采用RV擺線減速器,使定位誤差控制在±0.2MM內;
4、采用內置真空壓縮機的方式,為機器人抓手的真空吸附提供獨立、穩定的氣c源,使機器人的使用不受使用場地氣源的影響,保證抓手真空吸附的安全性和穩定性,避免工作中途掉落;
5、選用的PLC、伺服,電機、真空泵等分別出自歐姆龍或臺達、日本森田、美國AIRTEOH。絲桿、直線導軌、氣缸等為MISUMI、亞德客品牌;
6、視覺在線監測技術:為了保證工作的質量和避免模具的損壞,快速檢測工件是否壓傷、漏沖孔及廢料上浮等,降低產品報廢率,本機器在中轉臺處采用高分辨率的影像視覺系統,實現對中轉臺上工件的拍照和0.1秒內的快速傳輸,對沖壓產品品質快速判定,通過程序控制實現在線快速處理。

















