
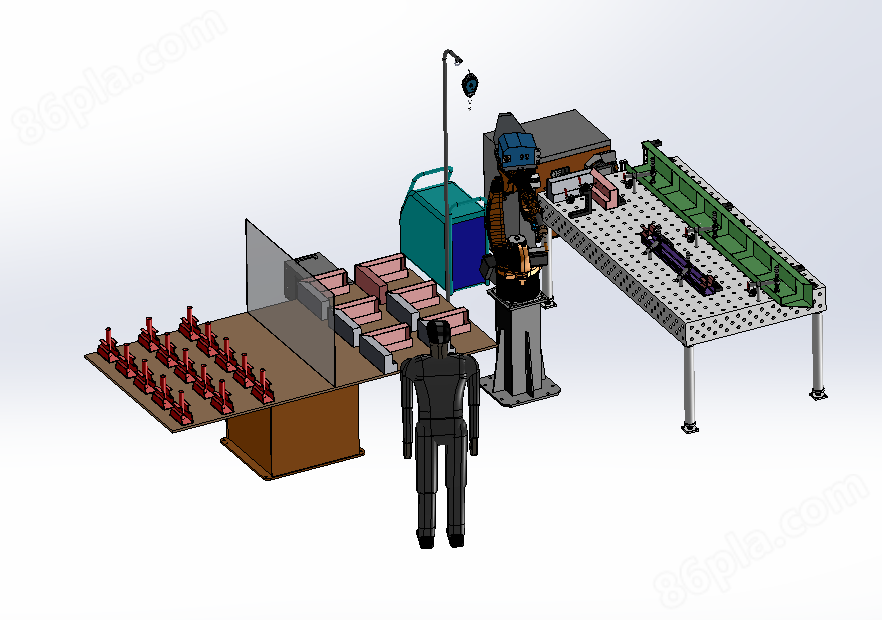

該系統由焊接機器人、焊接電源、、回轉變位機、工裝平臺等組成。
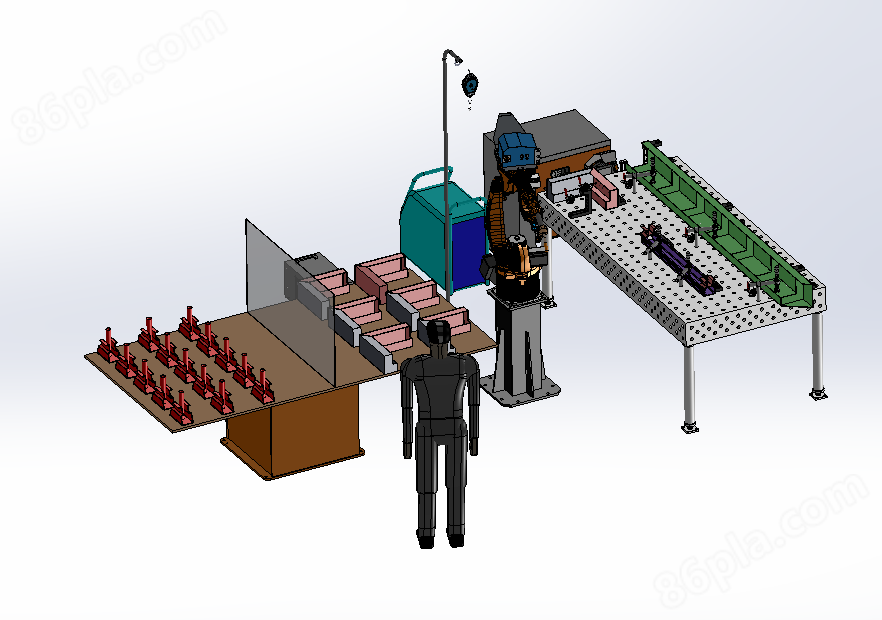
焊接平臺工位,人工將共件依次裝夾在焊接平臺上,人工操作快速夾鉗定位夾緊工件,機器人開始焊接。
回轉變位機工位,人工將共件依次裝夾,回轉變位機旋轉,機器人開始焊接,焊接同時人工可以在回轉盤另一裝加工件。
配置表
| 序號 | 名稱 | 型號及配置 | 生產廠家 | 數量 | 備注 | |
| 一、機器人系統 | ||||||
| 1 | 弧焊機器人本體 | KR10 | 德國KUKA | 1套 |
| |
| 2 | 控制柜 | KRC4 | 德國KUKA | 1套 |
| |
| 3 | 示教器 | SMART PAD | 德國KUKA | 1套 |
| |
| 4 | 系統連線總成 |
| 德國KUKA | 1套 |
| |
| 二、焊接系統 | ||||||
| 1 | 焊接電源 | Pulse 450 | 芬蘭肯比 | 1套 |
| |
| 2 | 送絲機 |
| 芬蘭肯比 | 1套 | ||
| 3 | 水箱 | 制冷 | 臺州展力 | 1套 |
| |
| 4 | 機器人專用水冷焊槍 |
| RBT | 1套 |
| |
| 5 | 焊槍夾持器 |
| RBT | 1套 |
| |
| 6 | 防碰撞 |
| RBT | 1套 |
| |
| 三、周邊設備 | ||||||
| 1 | 柔性工裝 |
| 諾博泰 | 1套 |
| |
| 2 | 機器人底座 |
| 諾博泰 | 1套 |
| |
| 3 | STP回轉變位機 | 含工裝 | 諾博泰 | 1套 |
| |
| 4 | 平衡器支架 |
| 諾博泰 | 1套 |
| |
| 5 | 控制柜放置架 |
| 諾博泰 | 1套 |
| |
| 四、系統控制設備 | ||||||
| 1 | 外部急停控制裝置 |
| 諾博泰 | 2套 |
| |
















