


JUNCHW品牌關節機器人特性:
●低成本,高適應性
●易用、可靠、高速
●占地面積小,動作范圍大
●驅控一體,操作簡單,輕松實現自動化作業。
關節機器人U3-series技術參數:| 型號 | U3 series | |||
| 安裝方式 | 水平安裝 | |||
| 臂長 | 第1-2軸 | 450mm | 550mm | 650mm |
| 本體重量(不含線纜重) | 22kg | 22.5kg | 23.5kg | |
| 運動速度 | J1、J2 | 6060mm/s | 6410mm/s | 6790mm/s |
| J3 | 1000mm/s | |||
| J4 | 1215°/s | |||
| 重復定位精度 | J1、J2 | ±0.01mm | ||
| J3 | ±0.01mm | |||
| J4 | ±0.01° | |||
| 運動范圍 | J1 | ±150° | ||
| J2 | ±150° | |||
| J3 | 150mm | |||
| J4 | ±360° | |||
| 負載 | 額定值 | 1kg | ||
| 值 | 3kg | |||
| 標準循環時間*¹ | 0.43/s | 0.45/s | 0.47/s | |
| 第四關節容許慣性力矩*² | 額定值 | 0.01kg.m² | ||
| 值 | 0.1kg.m² | |||
| 電機功耗 | 第1軸 | 400W | ||
| 第2軸 | 200W | |||
| 第3軸 | 100W | |||
| 第4軸 | 100W | |||
| 第3關節下壓力 | 100N | |||
| 原點復位 | 無需原點復位 | |||
| 用戶電路、氣路*³ | 用戶電路 | 15pin(DB接口,1-6號可用) | ||
| 用戶氣路 | Φ4mmx4 Φ6mmx1 | |||
*1.負載1kg下,水平方向300mm,垂直方向25mm往返,粗定位時。
*2.值在加速度系數的設定上有限制。
*3.本體6輸入2輸出,基座4輸入2輸出,控制箱14輸入10輸出。
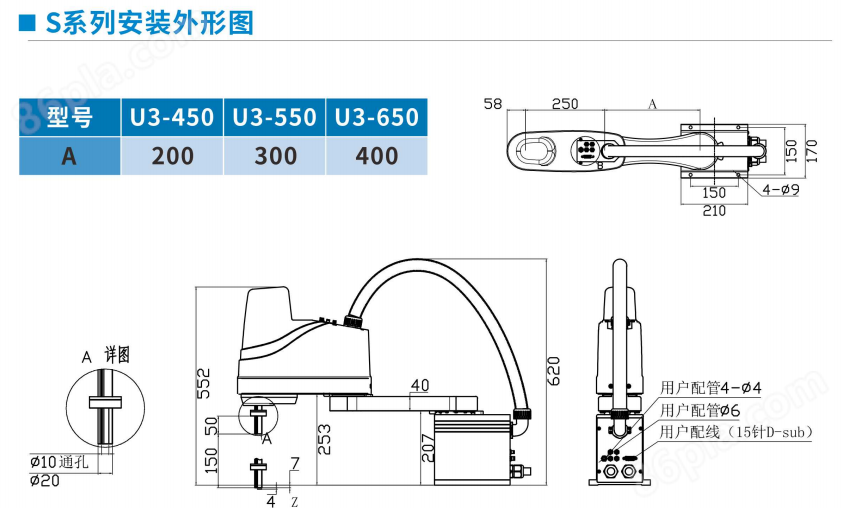
關節機器人U3-series安裝外形圖:
關節機器人的應用:
關節機器人在x,y軸方向上具有良好的轉動特性,而在Z軸方向具有高強度的剛性,其串接的兩桿結構,類似人的手臂,可以在作業空間中靈活收放,特別適合平面定位,垂直方向進行裝配取放等作業,主要應用于精密金屬加工、電子電氣、塑料工業、鑄造行業、電器行業、食品行業、冶金行業、玻璃行業、煙草行業、化工行業等領域。
關節機器人U3-series安裝外形圖:
關節機器人的應用:
關節機器人在x,y軸方向上具有良好的轉動特性,而在Z軸方向具有高強度的剛性,其串接的兩桿結構,類似人的手臂,可以在作業空間中靈活收放,特別適合平面定位,垂直方向進行裝配取放等作業,主要應用于精密金屬加工、電子電氣、塑料工業、鑄造行業、電器行業、食品行業、冶金行業、玻璃行業、煙草行業、化工行業等領域。















