助力/動(dòng)力輔助系統(tǒng)開發(fā)
助力和“Power Assist System動(dòng)力輔助系統(tǒng)”是一種“人力+電力”的混合動(dòng)力模式,主要采用力矩等傳感器檢測(cè)運(yùn)動(dòng)方向的力或角度,信號(hào)傳輸給電子控制單元,電子控制單元根據(jù)一定的控制測(cè)量,向電動(dòng)機(jī)驅(qū)動(dòng)器發(fā)出動(dòng)作指令,電動(dòng)機(jī)就會(huì)根據(jù)具體的需要輸出相應(yīng)大小的力來產(chǎn)生助動(dòng)力。在外骨骼機(jī)器人,助力搬運(yùn)、提升機(jī)械設(shè)備,電動(dòng)代步車,電動(dòng)助力轉(zhuǎn)向等場(chǎng)合應(yīng)用廣泛。
合動(dòng)智能開發(fā)了智能助力機(jī)械手的驅(qū)動(dòng)、控制一體化的系統(tǒng),結(jié)構(gòu)緊湊,生產(chǎn)安裝極為方便,性能可靠,主要特點(diǎn)如下:
| 序號(hào) | 功能 | 參數(shù) | 序號(hào) | 功能 | 參數(shù) |
| 1 | 供電電壓 | 48V | 5 | 模擬信號(hào) | 2路 |
| 2 | 功率 | 500W | 6 | 制動(dòng)電阻 | 不含,需要外接 |
| 3 | 電機(jī) | 交流伺服 | 7 | 伺服模式 | 電流、速度、位置 |
| 4 | 傳感器 | 霍爾和光電編碼器 | 8 | 其它接口 | AD、IO、RS232 |
碰撞保護(hù)
隨著機(jī)器人應(yīng)用范圍增大,人們對(duì)機(jī)器人的要求也越來越高,尤其在機(jī)器人安全性能方面。最初研制的機(jī)器人只能完成一些簡(jiǎn)單的重復(fù)任務(wù),不具備人機(jī)交互能力;隨著技術(shù)的高速發(fā)展,機(jī)器人趨于智能化,能夠完成更加復(fù)雜的任務(wù),例如噴涂、裝配、鉆孔等。
傳統(tǒng)的工業(yè)機(jī)器人并未配備適當(dāng)?shù)陌踩团鲎矙z測(cè)系統(tǒng)。因此,為保證機(jī)器的安全運(yùn)行,往往要求配備防護(hù)欄,用于保證運(yùn)行時(shí)與人隔離。
但是隨著技術(shù)發(fā)展,機(jī)器人開始承擔(dān)越來越復(fù)雜的任務(wù)。這些任務(wù)往往要求工作人員即時(shí)介入,因而使得如何實(shí)現(xiàn)安全的人機(jī)交互成為至關(guān)重要的問題。為保證安全,控制器需要實(shí)時(shí)檢測(cè)機(jī)器人與工作人員之間是否存在碰撞,并通過相應(yīng)的控制策略保證碰撞不至于傷害工作人員。
當(dāng)前,大多數(shù)檢測(cè)碰撞或碰撞力都是通過添加外部傳感器實(shí)現(xiàn)的。
? 采用腕力傳感器來檢測(cè)碰撞:該方法可以精確檢測(cè)手抓末端的碰撞力,但無法檢測(cè)機(jī)器人其它部位的碰撞,故而檢測(cè)范圍受限,一般應(yīng)用于磨削力、裝配力等手抓末端碰撞力的檢測(cè)。
?采用感知皮膚來檢測(cè)碰撞:該方法將感知皮膚覆蓋在機(jī)器人全身,可檢測(cè)到任意部位的碰撞。但缺點(diǎn)在于,布線比較復(fù)雜,抗力較差,且極大的增加了處理器的運(yùn)算量。凡是使用外部傳感器檢測(cè)碰撞或碰撞力的方法,都不可避免的導(dǎo)致系統(tǒng)成本和復(fù)雜程度的大幅上升。
?采用電機(jī)的電流或者反饋的力矩來檢測(cè)碰撞:這是一種能夠廣泛應(yīng)用于各種工業(yè)機(jī)器人的方案,無需額外添加傳感器,且檢測(cè)范圍能夠覆蓋機(jī)器人的整個(gè)表面。
綜上,前兩種方法均在不同程度上具有局限性,種方法檢測(cè)范圍受限,第二種方法布線復(fù)雜,第三種方法則解決了前兩者的不足,前景。
合動(dòng)智能機(jī)器人的碰撞保護(hù)技術(shù)
考慮到工業(yè)機(jī)器人的實(shí)際工作情況和性能要求,合動(dòng)智能采用的正是上述第三種方法,即利用機(jī)器人自身傳感器來檢測(cè)碰撞。
實(shí)現(xiàn)碰撞檢測(cè)的流程為,通過驅(qū)動(dòng)讀取當(dāng)前機(jī)器人各關(guān)節(jié)的位置、速度和加速度,再將對(duì)應(yīng)的參數(shù)代入下式:
其中
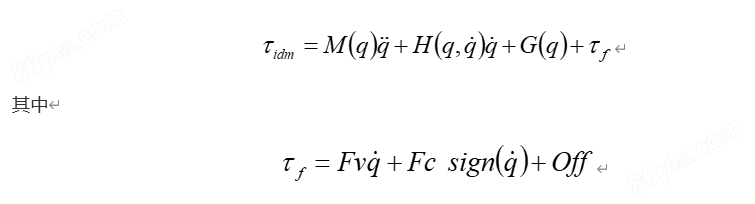
公式中的 是過逆動(dòng)力學(xué)算得的電機(jī)所需要的力矩,其計(jì)算公式包括慣性力項(xiàng)、 科里奧利力和離心力項(xiàng) 、重力項(xiàng)及摩擦力項(xiàng)。而當(dāng)中的摩擦力項(xiàng)根據(jù)選擇的摩擦力模型可分解為粘性摩擦力項(xiàng)、庫(kù)侖摩擦力項(xiàng)以及補(bǔ)償。
是過逆動(dòng)力學(xué)算得的電機(jī)所需要的力矩,其計(jì)算公式包括慣性力項(xiàng)、 科里奧利力和離心力項(xiàng) 、重力項(xiàng)及摩擦力項(xiàng)。而當(dāng)中的摩擦力項(xiàng)根據(jù)選擇的摩擦力模型可分解為粘性摩擦力項(xiàng)、庫(kù)侖摩擦力項(xiàng)以及補(bǔ)償。
初步看,該過程類似于拖動(dòng)示教編程,但接下來對(duì)于理論力矩的使用就截然不同了。在碰撞檢測(cè)中,此理論力矩值將與通過驅(qū)動(dòng)讀取的實(shí)際力矩值進(jìn)行比對(duì)。如產(chǎn)生較大差值(即超出設(shè)定的臨界值),則可判斷為機(jī)器人遇到了障礙或發(fā)生了碰撞。
通過利用電機(jī)的電流或反饋的力矩而實(shí)現(xiàn)的碰撞檢測(cè),合動(dòng)智能研發(fā)的機(jī)器人控制器能夠在不額外添加傳感器的前提下實(shí)現(xiàn)機(jī)器人本體各部分的碰撞檢測(cè),這不但提高了人機(jī)交互的安全性和機(jī)器人本身的安全性,也從某種程度上提高了機(jī)器人的耐用度,同時(shí)延長(zhǎng)其使用壽命。
角度傳感器的姿態(tài)控制
姿態(tài)控制在眾多領(lǐng)域得到廣泛的應(yīng)用:
1、相機(jī)和攝像機(jī)的穩(wěn)定平臺(tái)
2、無人機(jī)等飛行器
3、無人機(jī)等應(yīng)用的云臺(tái)
4、機(jī)器人
5、超聲波、光電探測(cè)器等傳感器穩(wěn)定平臺(tái)
6、車載火炮發(fā)射臺(tái)等設(shè)備
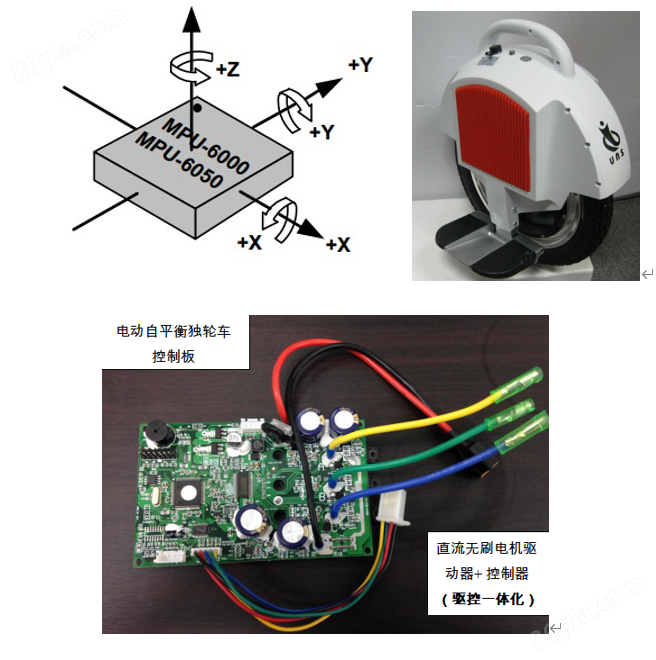
7、平衡車
姿態(tài)控制的核心技術(shù)是采用陀螺儀、加速度計(jì)、光電編碼器等角度傳感器,測(cè)量角度,控制器根據(jù)角度信號(hào)和一定的控制策略,控制電機(jī),實(shí)現(xiàn)被控對(duì)象的角度的控制。本研究采用集成三軸陀螺儀和加速度計(jì)的MPU6050固態(tài)角度傳感器,實(shí)現(xiàn)平衡車、四旋翼無人機(jī)、云臺(tái)的控制,控制板累計(jì)量產(chǎn)一萬多套。