產品|公司|采購|招標
返回產品中心
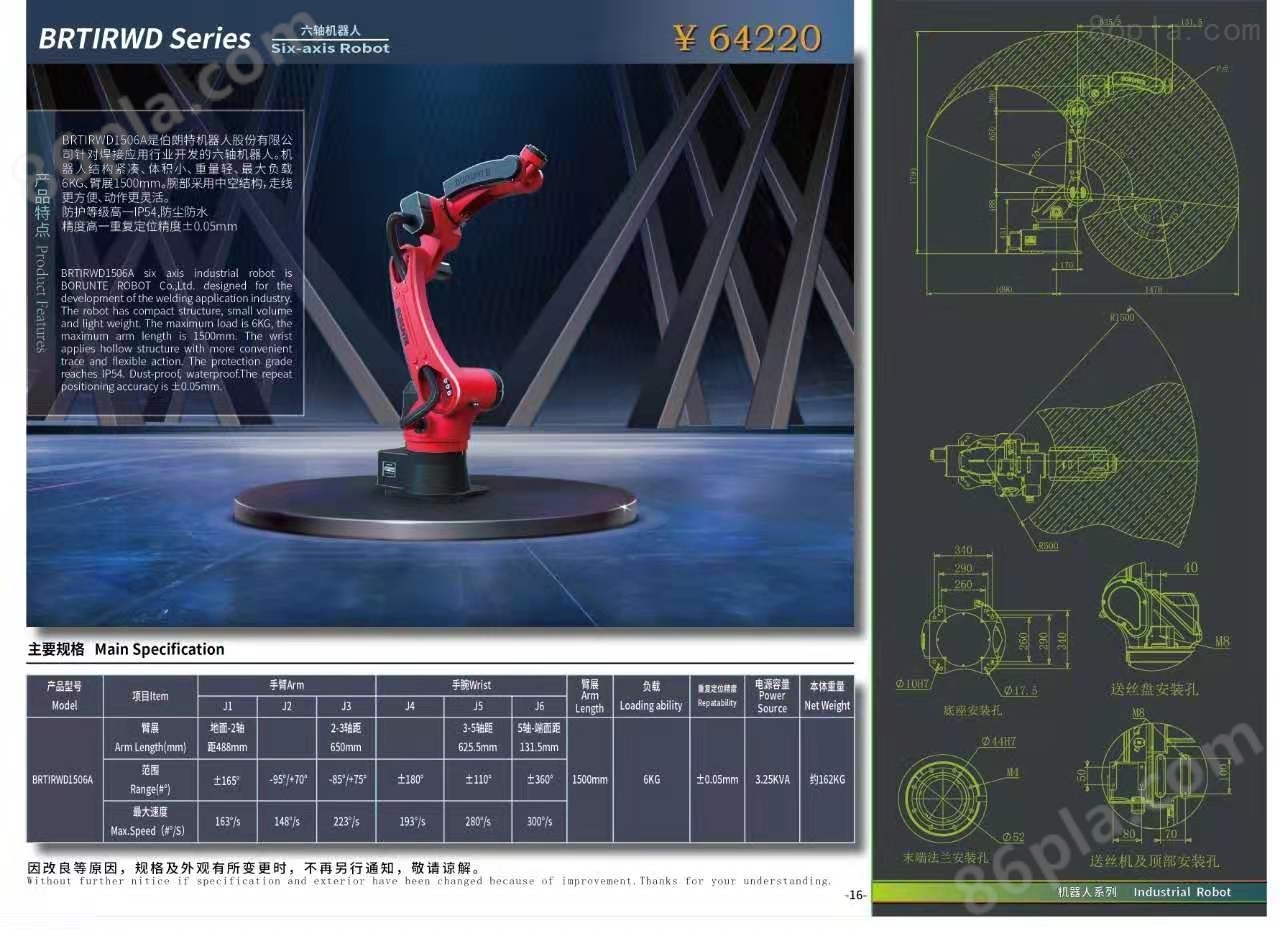
機器人
聯系方式:153-1887-8619
聯系我們時請說明是 塑料機械網 上看到的信息,謝謝!
產品名稱價格
FANUC碼垛機器人
ABB搬運機器人
FANUC搬運機器人
ABB上下料機器人
KUKA上下料機器人
FANUC上下料機器人
點焊焊接機器人2
縫焊焊接機器人
ABB焊接機器人
FANUC焊接機器人
點焊焊接機器人
三維切割機龍門式機器人
其他機器人碼垛機
大荷載機器人碼垛機
四軸機器人碼垛機
六軸機器人碼垛機
閥口袋全自動機器人碼垛生產線
敞口袋全自動機器人碼垛生產線
全自動機器人碼磚生產線
機器人瑪垛機
機器人碼垛機
機器人碼垛流水線,碼垛機器人
紙箱碼垛機,碼垛機器人流水線
全自動套袋包裝機器人碼垛生產線
XT-4510自走式機器人纏繞機
*您想獲取產品的資料:
個人信息:
對比欄
微信公眾號
聯系方式
山東伯朗特智能裝備有限公司
采購或詢價產品,請直接撥打電話聯系
聯系人:
會員登錄新用戶注冊 >
請輸入賬號
請輸入密碼
請輸驗證碼
<del id="coous"></del>