
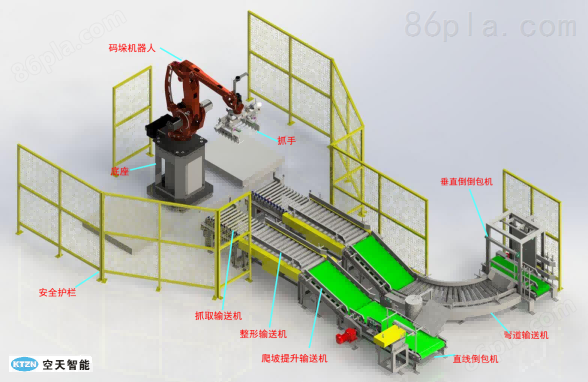









機器人碼垛生產線說明
1、碼垛生產組成:輸送功能線體+碼垛機器人+托盤庫自動供給線
2、碼垛輸送線條單元
2.1、垂直倒包輸送機
立式袋子經過包裝機、縫包機及輸送機進入垂直倒包輸送機,通過光電開關的檢測,判斷袋子是否到達推包的位置;同時通過下方水平輸送機的光電開關來檢測是否滿足有一個袋子推下的安全距離等條件,如果各方面都滿足條件,則PLC驅動繼電器→電磁閥→氣缸動作,將袋子推倒成水平狀態輸送。
2.2、爬坡輸送機
產品通過提升輸送機將袋子輸送到一定高度,來實現后端整形、壓包、抓取等各種功能,提高抓取速度,并且通過光電檢測和PLC程序控制來實現緩沖作用。2.3.壓包振動整形輸送機
包裝袋被輸送到壓包振動整形輸送機,對包裝袋壓包輔助整形后再振動整形,使包裝袋里的產品均勻一致,碼垛的剁型更加整齊美觀。同時可以增加清灰裝置。
2.5、抓取輸送機
包裝袋從壓包輸送機輸送到抓取輸送機上,配合機器人碼垛。保證碼垛機器人安全、方便的抓取,減少噪聲。
2.6、機器人抓手
當待碼產品輸送至抓取線且光電開關感應到產品到位,同時碼垛位光電感應到托盤位置有待碼托盤,碼垛機程序驅動伺服電機將攜有抓手的法蘭盤運動到位后,驅動抓手電磁閥,氣缸動作,不銹鋼抓手將袋子分別有序的放置到托盤上面。
2.7安全隔離網
功能:安全隔離將機器人工作區域及輸送危險區域隔離禁止人員進入,且安裝檢測報警裝置。如設備工作是闖入立即報警,設備將停止工作,提高操作人員按系數。懸掛安全警示標志。
2.8 碼垛機器人技術指標
機器人是整個機器人碼垛設備的核心部分,機器人是一種仿人操作、自動控制、可重復編程、能在三維空間完成各種規定作業的機電一體化市場設備。它根據不同的物料包裝、堆垛順序、層數要求進行參數設置,實現不同類型物料包裝的搬運作業。
機器人系統與輸送帶控制系統進行數字通信,以實現機器人系統輸入傳輸帶輸出傳輸帶協調控制,當碼垛發送以外情況,能自動報警。
機械手主要材料采用鋁合金型材、不銹鋼,執行元件采用氣缸、具有穩定性高動作靈活等特點。當生產環境低于0℃時機器人由停止狀態變為運行時,開機時會有一段時間預熱過程。
功能:通過系統各個環節配合,將包裝袋按照一定固定的數量整齊的依照一定規律順序擺放道托盤。
2.9碼垛機器人
進口機器人對比表 | ||||
品牌 | 型號 | 負載 | 碼垛半徑 | 速度(單抓五花) |
ABB | 460-110 | 110kg | 2400mm | 900bag/h |
660-180 | 180kg | 3150mm | 850bag/h | |
發那科 | MiB/110H | 110kg | 2400mm | 980bag/h |
MiB/140H | 140kg | 2865mm | 950bag/h | |
川崎 | CP130 | 130kg | 3200mm | 950bag/h |
CP180 | 180kg | 3200mm | 850bag/h | |
庫卡 | KR120 | 120kg | 2500mm | 850bag/h |
KR180 | 180kg | 2500mm | 800bag/h | |
2.10托盤庫
工人將托盤碼好整體用叉車放入托盤庫,當一個托盤碼好,碼垛輸送機將其輸送到叉取輸送機的同時,托盤庫下面氣缸通過中封型電磁閥控制,頂起托盤庫中的托盤并一次放行一個托盤,此托盤將被輸送到碼垛輸送機上,如此反復循環可有效的節省放置托盤的次數,也保證了操作的安全性。
空盤輸送機將托盤庫中的空托盤輸送出來,并用阻擋氣缸定位空托盤,為輸放入吊帶做好準備,采用雙節距鏈條傳動,運行平穩、安全可靠。
2.12重盤輸送機
當空托盤輸送到重盤輸送機后,通過光電檢測到空托盤,將信號傳給PLC,PLC驅動電磁閥動作,氣缸將托盤限位板頂起,定位空托盤,碼垛機開始碼垛。
2.13叉取輸送機
叉取輸送機為無動力輸送機,因碼垛輸送機和滿垛輸送機均為有動力輸送機,可為碼好產品的托盤輸送到叉取輸送機上提供很大的推力;同時碼好產品的托盤質量很大,具有很大的慣性,也可使托盤向前推進。
叉取輸送機采用無動力鋼制滾筒,摩擦力很小。采用這種設計方式,大大降低了設備成本,產品穩定可靠、經久耐用。
叉車限位
本碼垛生產線有叉車限位,約長1600寬100高100。叉車限位主要用在托盤庫和叉取輸送機上,利用叉車限位來限制叉車的叉取位,可以有效保護托盤庫和叉取輸送機不會被叉車經常碰撞而造成設備損壞;利用叉車限位還可以準確的定位空托盤放入托盤庫的位置,保護叉車操作的安全,提高工作效率。
















