




結構光雙目相機具有標準的機器視覺界面和高分辨率的記錄點云功能,這些數據用于確定物體的形狀、位置和方向。測量原理是基于光從光源到物體再回到相機所需要的時間。光源和圖像采集都是同步的,這樣就可以從圖像數據中提取和計算距離。
移動機器人要想實現安全避障第壹步便是對環境進行感知。就繞障來說,移動機器人需要通過傳感器實時獲取自身周圍障礙物信息,包括尺寸、形狀和位置等信息。在避障方式上,各家的避障傳感器種類繁多,但無外乎單點紅外傳感器,單線激光雷達、超聲波傳感器、碰撞條以及視覺傳感器。
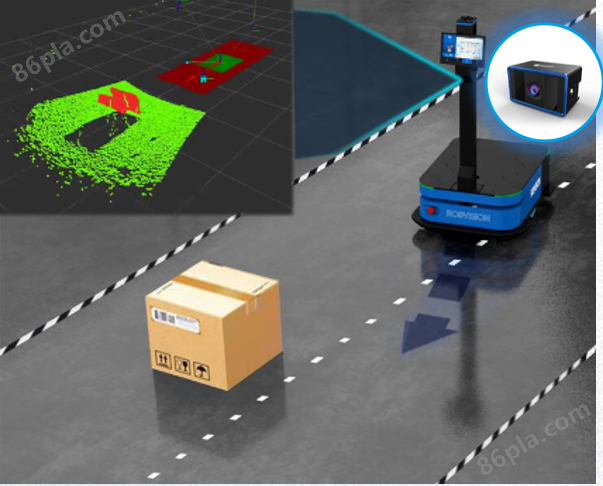
藍芯科技結構光雙目相機為移動機器人而生,解決了3D視覺傳感器在工業應用中的諸多技術難題,包括高環境光干擾,金屬反光,反射率影響,運動模糊,多機干擾等等。為應用在移動機器人上,相機曾在在振動臺(100Hz震動)、高低溫循環箱(-10℃-80℃)內連續運轉超過2個月。常規室內情況下,裝有Eagle傳感器的移動機器人可以避開地面以上3cm障礙物或低于地平面3cm的凹坑,面對窗邊陽光直射場景、金屬拉絲反光、低至5%反射率等情況依然有較好的避障性能。
其采用Eagle系列LXPS-DS3120-E 傳感器進行避障,傳感器詳細規格參數如下:
測距范圍: 0.5-6m(遠測距12m)
測距精度: 1% @ 2m 70%反射率
視場角: 72°X 55°;
分辨率: 320*240
幀率: 20fps
數據接口: USB3.0/Ethernet
相機尺寸: 43mm×78mm×38mm
運行環境: -10℃-70℃
陽光抑制: 50klux















