






該技術(shù)主要對立體相機圖像采集載體得到的立體深度數(shù)據(jù)進(jìn)行智能化的識別、認(rèn)知、檢測和定位。具備彩色、立體、高精度、可描述、可量化、自我學(xué)習(xí)、數(shù)據(jù)共享、數(shù)據(jù)傳輸?shù)闹悄芑兄罢J(rèn)知能力。該技術(shù)無需經(jīng)過前期圖片的大量認(rèn)知學(xué)習(xí)及訓(xùn)練,是基于理解式的自學(xué)習(xí)過程,一種更接近人以及機器人的自然認(rèn)知能力。
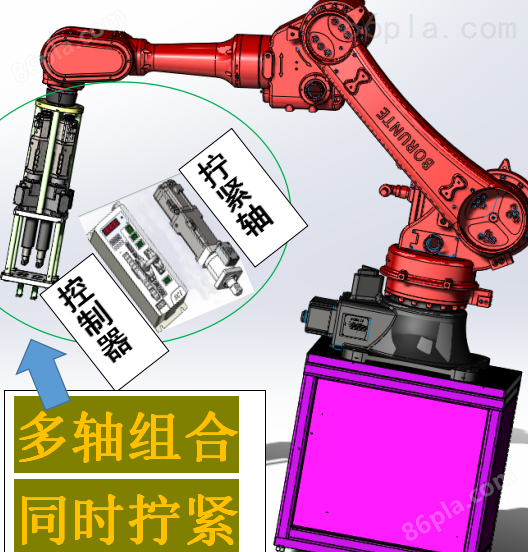
在應(yīng)用上可為機器人提供一雙可引導(dǎo)操作的智能化眼睛,可通過該技術(shù)進(jìn)行三維空間的物體定位、物體識別、機器人引導(dǎo)、物體測量、物體計數(shù)、物體表面缺陷檢測等,解決了現(xiàn)有平面視覺人工智能技術(shù)圖像數(shù)據(jù)采集難、人工標(biāo)注量大、項目周期長、硬件成本高、通用性差、適用性弱等局限,更具有數(shù)據(jù)信息多樣性、學(xué)習(xí)能力強、項目周期落地時間短等特性。
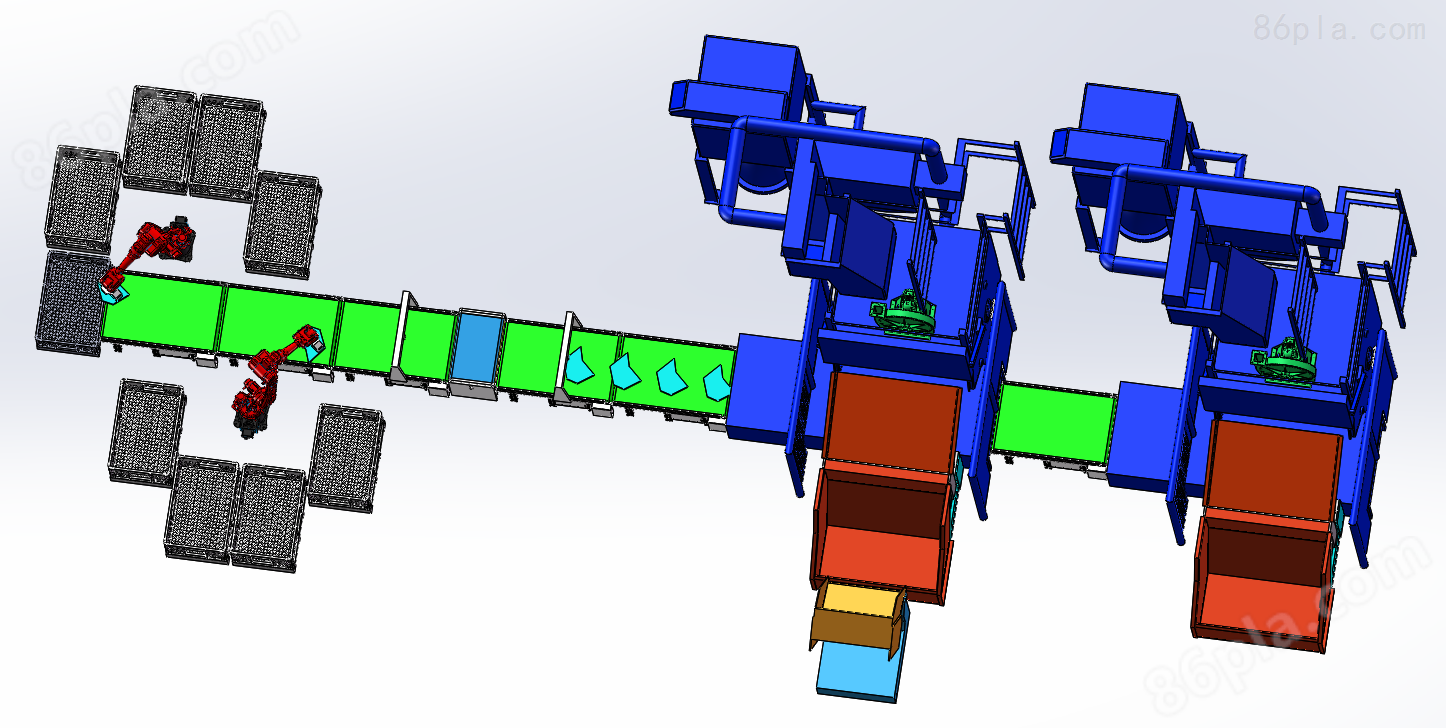
該技術(shù)軟硬件一體化系列產(chǎn)品及解決方案主要用于工業(yè)機械臂引導(dǎo)抓取、分類、分揀、搬運應(yīng)用;制造業(yè)物體表面檢測、測量;物流行業(yè)包裹物體尺寸測量;鋼鐵行業(yè)棒材計數(shù)及打標(biāo);機器人行業(yè)引導(dǎo)、定位及識別;教育行業(yè)科研等。并可根據(jù)需求為其他行業(yè)提供整體解決方案。
















