


車床機械手手爪聯結結構
CNC機械手末端執行器是安裝在機器人手腕上用來進行某種操作或作業的附加裝置。機器人末端執行器的種類很多,以適應機器人的不同作業及操作要求。末端執行器可分為搬運用、加工用和測量用等。
搬運用末端執行器是指各種夾持裝置,用來抓取或吸附被搬運的物體。
加工用末端執行器是帶有噴槍、焊槍、砂輪、銑刀等加工工具的機器人附加裝置,用來進行相應的加工作業。
測量用末端執行器是裝有測量頭或傳感器的附加裝置,用來進行測量及檢驗作業。




在設計機器人末端執行器時,應注意以下問題;
1.數控車床機械手末端執行器是根據機器人作業要求來設計的。一個新的末端執行器的出現,就可以增加一種機器人新的應用場所。因此,根據作業的需要和人們的想象力而創造的新的機器人末端執行器,將不斷的擴大機器人的應用領域。
2.車床機械手末端執行器的重量、被抓取物體的重量及操作力的總和機器人容許的負荷力。因此,要求機器人末端執行器體積小、重量輕、結構緊湊。
3.CNC機械手末端執行器的*性與性是矛盾的。*末端執行器在結構上很復雜,甚至很難實現,例如,仿人的*機器人靈巧手,至今尚未實用化。目前,能用于生產的還是那些結構簡單、*性不強的機器人末端執行器。從工業實際應用出發,應著重開發各種的、高效率的機器人末端執行器,加之以末端執行器的快速更換裝置,以實現機器人多種作業功能,而不主張用一個*的末端執行器去完成多種作業。因為這種*的執行器的結構復雜且造價昂貴。
4.通用性和*性是兩個概念,*性是指一機多能,而通用性是指有限的末端執行器,可適用于不同的機器人,這就要求末端執行器要有標準的機械接口(如法蘭),使末端執行器實現標準化和積木化。
5.車床機械手末端執行器要便于安裝和維修,易于實現計算機控制。用計算機控制zui方便的是電氣式執行機構。因此,工業機器人執行機構的主流是電氣式,其次是液壓式和氣壓式(在驅動接口中需要增加電-液或電-氣變換環節)。
車床機械手的末端裝置,卡爪部分基本上都是屬于定制型的,因為大部分客戶的工件都是不一樣的,而數控車床機械手要實現上下料取料和送料的話,就需要卡爪定制得合理,那么,車床機械手卡爪是如何設計的?數控車床機械手卡爪的設計就需要有適當的夾緊力和有足夠的開閉范圍。下面就具體分析一下:
1、力求結構簡單,重量輕,體積小
車床機械手手部處于腕部的zui前端,工作時運動狀態多變,其結構,重量和體積直接影響整個車床機械手的結構,抓重,定位精度,運動速度等性能。因此,在設計手部時,必須力求結構簡單,重量輕,體積小。
2、有適當的夾緊力
車床機械手手部在工作時,應具有適當的夾緊力,以保證夾持穩定可靠,變形小,且不損壞工件的已加工表面。對于剛性很差的工件夾緊力大小應該設計得可以調節,對于笨重的工件應考慮采用自鎖安全裝置。
3、有足夠的開閉范圍
數控車床機械手夾持類手部的手指都有張開和閉合裝置。工作時,一個手指開閉位置以zui大變化量稱為開閉范圍。對于回轉型手部手指開閉范圍,可用開閉角和手指夾緊端長度表示。手指開閉范圍的要求與許多因素有關,如工件的形狀和尺寸,手指的形狀和尺寸,一般來說,如工作環境許可,開閉范圍大一些較好。溫馨提示,本文引用于博立斯“”,更多數控車床機械手、車床機械手、沖壓機械手信息博立斯智能裝備。
4、手指應有一定的強度和剛度
5、其它要求
因此送料,夾緊車床機械手,根據工件的形狀,采用zui常用的外卡式兩指鉗爪,夾緊方式用常閉史彈簧夾緊,松開時,用單作用式液壓缸。此種結構較為簡單,制造方便。
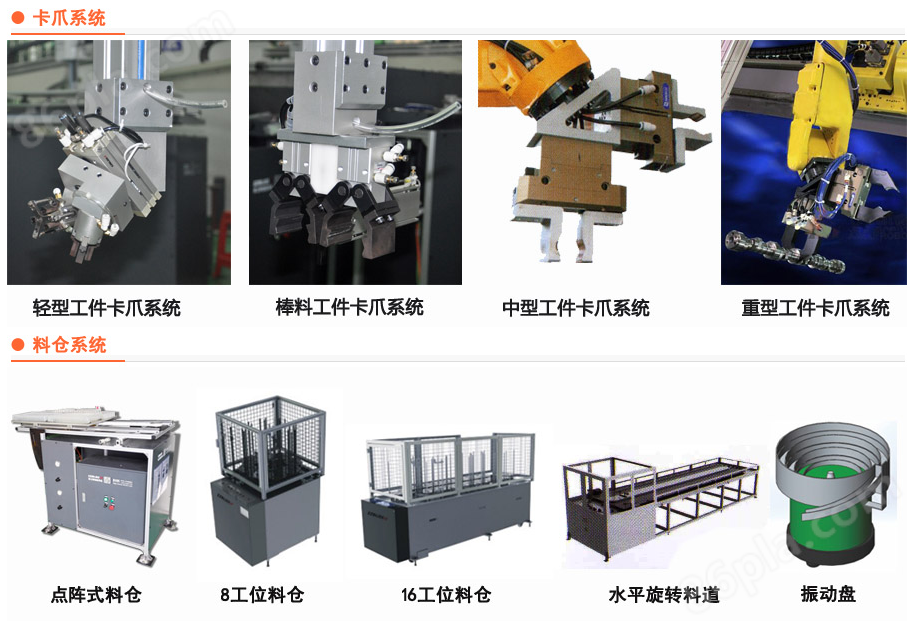
數控車床機械手末端裝置包含氣動轉缸、氣動手指及夾具,博立斯根據數控車床加工工件的裝夾工藝要求配置的末端裝置,可以滿足各種軸類工件、圓形工件、環形工件、異形工件及其他特殊工件的快速、精準裝夾要求。因為數控車床機械手很多地方都是屬于定制型的,因此,車床機械手基本上是沒有現貨的,都是需要定制的,基本上交貨期是在七天以上,具體的以業務員和您洽談的為準。
















